 论微积分求导公式的一种全新推导模式及贝克莱悖论的彻底消除文档格式.docx
论微积分求导公式的一种全新推导模式及贝克莱悖论的彻底消除文档格式.docx
- 文档编号:1111489
- 上传时间:2023-04-30
- 格式:DOCX
- 页数:22
- 大小:129.94KB
论微积分求导公式的一种全新推导模式及贝克莱悖论的彻底消除文档格式.docx
《论微积分求导公式的一种全新推导模式及贝克莱悖论的彻底消除文档格式.docx》由会员分享,可在线阅读,更多相关《论微积分求导公式的一种全新推导模式及贝克莱悖论的彻底消除文档格式.docx(22页珍藏版)》请在冰点文库上搜索。
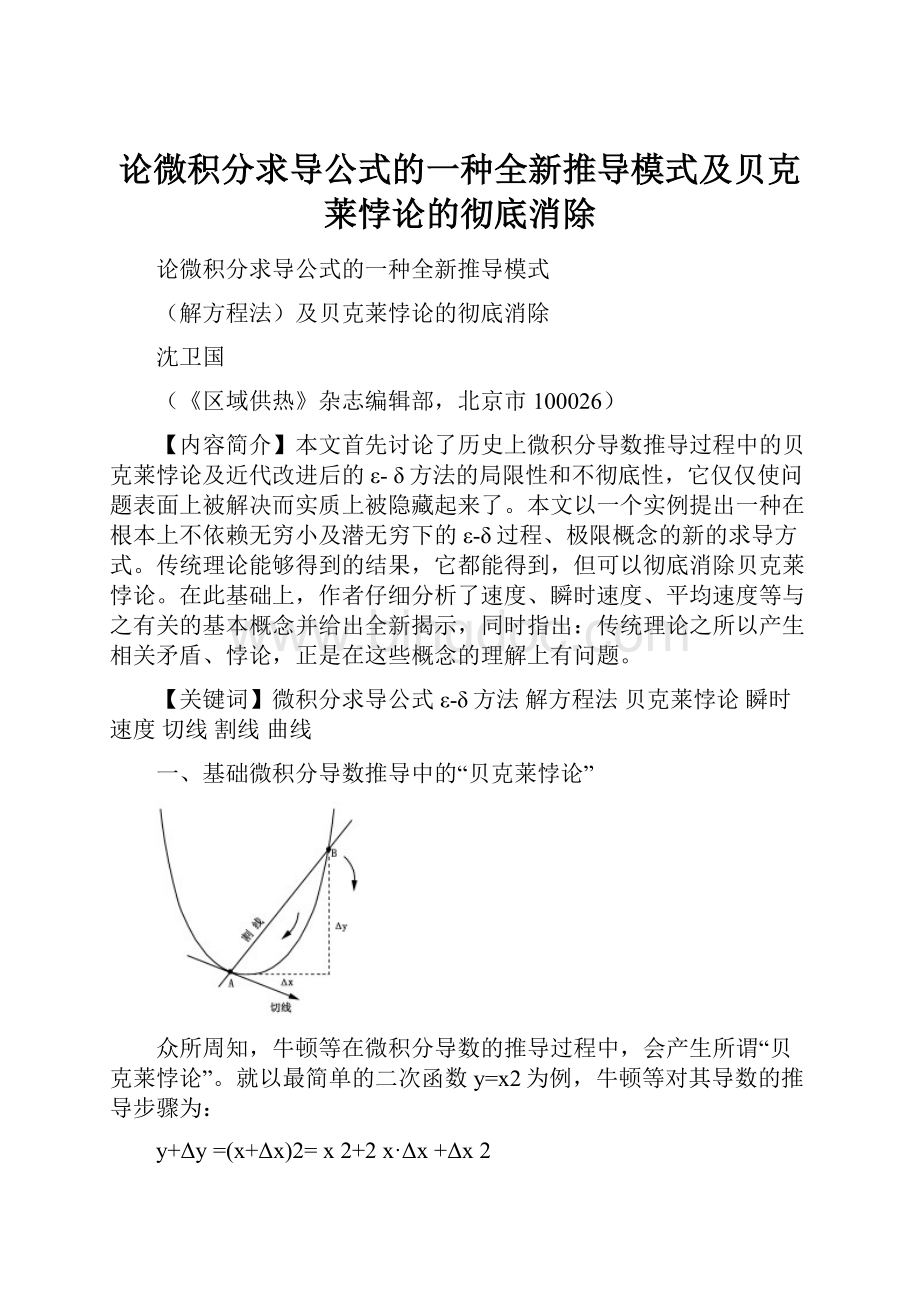
此即著名的“贝克莱悖论”。
二、传统微积分理论中对“贝克莱悖论”的解决方案及其问题
微积分在牛顿、莱布尼茨时代,不甚注重严格性。
推导中的粗疏和不严格之处并未引起多大注意。
只是在贝克莱提出这个著名悖论后,方才引起人们的重视。
其后,经过欧拉、拉格朗日、波尔查诺、柯西、达朗贝尔等的工作,终于得到现在已成经典的“ε-δ方法”[1][2]。
一般认为,这一方法本质上是建立在潜无穷观上的,它允许Δx→0,但Δx≠0,取极限后,用人为“定义”的方法令这个极限值即为该点的函数值,以保持函数在该点的连续性。
此方法只是表面上消除了牛顿求导方法中的在Δx=0时的贝克莱悖论问题。
[1]但实际上,由于此种方法的人为性,它并未给出在某点的导数求解过程中,在该点究竟发生了什么。
它号称“求出”了某点的某值,又不允许到达该点而只能无限接近,同时该点函数之值又被人为“定义”也就是“规定”出而非求出它刚好能够(可视为“碰巧”)等于该点所具有的、别的点趋近于它的“极限”值。
如此拖泥带水的方法很不自然,不能令人满意。
比如,文献[1]中举的一个有关求某点速度的例子,最后得到:
(2)
其中Δs为距离增量;
Δt为时间增量;
v为某点速度。
很显然,Δs/Δt是有明确的物理意义的,Δt不能等于0。
可是在Δt=0时的那一瞬间(时刻),究竟发生了什么?
为什么还会有、且唯一有精确的、原本只作为Δt→0而Δt≠0的极限存在的v值?
这一切都没有给出令人信服的解释。
我们知道,速度这一概念按传统理解,为单位时段物体所运动的距离。
离开了“时段”概念(无论其多小),还能有速度概念吗?
我们所说的或所认为的“瞬时速度”、“某时刻的速度”,究竟所指为何?
难道不是吗:
在Δt=0时,即时间看起来“静止”时,Δs的确也只能为0,那么Δs/Δt顺理成章地为0/0不是很自然吗?
但如此一来,又明显违反基本数学原则。
物理上也解释不通这个“瞬间速度”究竟是什么。
但多少年来,人们又在毫无顾忌地使用这个概念。
总之,问题仍旧没有从根本上被解决和解释。
还有一个问题。
微积分求导的“现代解释”中的潜无穷观点及过程不能自然到达所求点,只能靠“定义”,而现实中的运动、速度,“到达某点”及经过某段路径都是实实在在的,本质上是一个实无穷过程,这是一个矛盾。
总之,现在的微积分理论并不像一些人所声称的那样在逻辑上是“严谨”的,用人为“定义”所求点函数存在且连续的不自然的方法,只是在表面上消除“贝克莱悖论”。
我们不应忘记,微积分中某点的导数是被牛顿等(推导、计算)出来的,而不是定义出来的。
在这个意义上,贝克莱悖论并未在根本上被解决,它依然存在。
事实上,如前文所述,即使要用“定义”某点连续的方式来消除贝克莱悖论,也要事先求出该点极限值,但事实上存在一个ε-δ方法潜无穷极限悖论:
设有ε,总有δ,就意味着不可能有到达Δt=0之时,那怎会知道存在一个极限?
很显然,这是已知Δt=0时函数之值后才如此说的。
而如果事先已知Δt=0时函数有值,为何又偏说到达不了Δt=0的位置,只因为此时会出现
情况?
靠外部定义(如文献[1]中所言)不能解决(Δt=0处的)理论问题,它只是权宜之计,不是理论推出来的。
也就是说,如果极限值不是求出来的,你怎么会知道由ε-δ法会接近它(因ε-δ方法永达不到它)?
而如是求出来的,又会出现
情况,产生悖论,可见此类方法还是很有问题的。
总之,所谓ε-δ方法,实质隐藏了贝克莱悖论。
它说的是存在一个极限,只要对任何(所有)│x-x0│<δ的x,都有│f(x)-A│<ε,则f(x)在x=x0处有极限A,但如何保证(证明)对所有x都有上述极限?
你还得认为在x=x6时函数已经有了A值。
A即是如此已经被“求得”的,因为在我们得到(求出)存在极限A的结论之前,它已经存在于│f(x)-A│<ε的式子中了。
也只有如此才能证明ε-δ方法可用。
所以这是逻辑循环,不过只明说一半来“消除”悖论,贝克莱悖论被隐藏起来了。
牛顿是同时令Δx=0、Δx≠0,而ε-δ方法本质上实际是事先用Δx=0求出极限(无论人们承认与否),再定义其处连续,然后再令Δx≠0,不承认有Δx=0这回事罢了。
固一旦求出Δx=0的值,再令其为不可达的极限,再令(定义)其有值(连续),曾经的Δx就不再出现,即Δx=0与Δx≠0不过是不像牛顿方法那样同时出现罢了,这里是不同时出现,但仍然先后出现过。
它是“潜在”地使用实无穷,而“实在”地使用潜无穷罢了。
实无穷并未如所认为那样“彻底出局”,只不过是将贝克莱悖论由显形式变为了隐形式。
以上,笔者从函数极限、连续性的角度揭示了贝克莱悖论并未像人们宣称的那样被消除。
实际上,那还只是一个间接矛盾。
更明确的悖论,是直接从定义、定义域出发来看问题。
我们说,ε-δ方法、极限、函数的连续性等本质上依赖曲线上二点的方法对其它函数都适用,但唯独对导函数、对速度函数不适用。
此点竟被以往论者所未见。
这里有一个直观的说明,见图2。
图2
一个直角三角形,设有直接定义在Δx、Δy之上的函数
,即该三角形的两个直角边(或言“长与宽”、“底与高”)之比。
在被赋与物理意义后,我们完全可以理解成是速度。
显然,在Δx→0而Δx≠0时,上述函数都有定义。
无论Δx(进而Δy,也就是三角形)多么小。
这时传统的ε-δ方法当然可用。
但一旦到达A点,Δx=0(Δy=0),三角形根本不存在了,也就根本谈不上已消失了的“三角形的两个直角边之比”了。
比如,我们可以设Δy=Δx,则
=1,在Δx→0时也如此。
在Δx=0时,显然这个函数是有其极限的,即极限也等于1。
但函数本身
=
,为不定式,说明根本没有定义。
函数按定义在A点不连续,因为此时三角形已不存在了。
所以,我们完全可以根据此函数的特殊性(直角三角形二直角边之比),补充一个明确的定义:
该函数在A点无值、无定义(或言不确定、定义域不包括A(Δx=0时)点)。
所以函数在某点有极限,但完全可以不连续和没有确定值,除非重新用定义“令”其有值。
但如此一来,则与原定义(定义域)直接矛盾,形成真正意义的逻辑矛盾或悖论。
这实际就是贝克莱悖论的本质。
可见,所谓的“无定义”有两种:
一种只不过是“缺失”,补充定义即可;
另一种则是“公理保障”性的“无定义”,实际即等价于“不允许有定义”。
如两条边的长度比之于三角形的顶点、速度的本源性定义之于某时刻等等。
因此,传统上那种认为由ε-δ方法,在Δx、Δy之上直接定义也仅由它们的定义之下求出极限,再定义极限点导函数有值并连续的悖论消除法,不但没有如愿,反倒使矛盾更明确了。
因此,贝克莱悖论完全未被消除,其本质并不只是传统上认为的广义的、大多数的、一般意义的函数能否在A点连续、有极限的问题,而是导数、速度函数及更直接地直角三角形的二直角边之比这个特殊的函数,在三角形的顶点A究竟有无定义的问题,也就是一个定义域包括不包括A点的问题。
以往传统上的ε-δ方法,只是给出了一般函数的连续性问题,但不可能解决导函数、速度函数这个特殊函数在A点的连续性问题。
如果强行定义,必与原定义直接矛盾。
而所谓原定义,就是:
导函数、速度函数在传统方法下在A点“无定义”。
以往,这个“原定义”没有被明确提出,它仅以隐形式存在,这里我们将其“发现”并明确提出,作为“补充定义”。
它直接与ε-δ方法的导函数在所求点连续、有值的“定义”矛盾。
由此我们可以看出,所谓的“第二次数学危机”,并未像人们宣称的那样被消除,而只是被掩饰了。
它依然存在。
有人认为,教学中学生在理解ε-δ方法、极限概念及贝克莱悖论的消除上有困难,实际上,这一点不奇怪。
因为在导函数这一类特殊函数中,贝克莱悖论实际根本就未被消除。
一个本身就有破绽的理论,怎么能被人毫无疑问地接受呢?
顺便提一下,图2中A点的“三角形二直角边的比”(或等价地“导函数”、“瞬时速度”)还可以被定义吗?
以下我们将会看到,当然可以。
但这不能由传统作法那样用这里的Δx、Δy来得到或定,这个三角形在A点已经收缩成一点了。
但它可以由另一个三角形的直角边Δx′、Δy′来定义,即
。
以下我们可以看到,如此一个简单之极的思路与办法,是如何最终不但巧妙、而且与现实数学、物理世界完全协调并极其自然地解决了这个竟然延续了如此长时间的问题(悖论)的。
三、有关导数的一种全新求解方式及其与传统方法的比较
我们仍以二次函数y=x2为例。
设其与一直线y=bx-c有两个或一个交点,我们求其交点。
联立二方程,有:
(4)
将下式代入上式,则有x2-bx+c=0,其通解为:
,此时a=1(5)
当b2=4ac时,直线与曲线y=x2只有一个交点(解),为曲线y=x2的切线,即x=
,而b为直线(此时为切线)的斜率,即
b=2x(6)
与微积分牛顿方法得到的(1′)式完全一样。
我们设Δy′、Δx′为该直线上任意两点间的纵、横坐标差,则显然b=
=2x(7)
参见图3。
图3
这里我们不能不注意到,上述直线的斜率b=
,是该直线所固有的,它与曲线y=x2上的点毫无关系。
而在如图1所示的牛顿等的求法中,Δy、Δx所表征的二点,既必须是直线y=bx-c上的点,也必须是曲线y=x2上的点。
牛顿的甚或所谓的ε-δ方法,不过是如图1所示,曲线与直线(割线)的二交点,一点固定,一点沿图1中的箭头方向运动并不断接近固定点的过程。
当二点重合或未重合时,在曲线上的精确定位所要求的一点性与斜率本身所要求的二点性,都会产生矛盾。
这就是微积分贝克莱悖论的本质。
无论是牛顿不加说明地舍弃所谓“高阶无穷小”,还是ε-δ方法中的人为地定义函数的连续性,此根本矛盾都不会自动消除,只会被掩盖而已。
也就是说,传统理论无论是牛顿、莱布尼兹的古典方法还是近代被一些人认定已很完美的ε-δ方法,都是基于以下认识:
即既然所求为曲线上某一点的切线斜率,那我们就只能令斜率所要求的二点都必然始终处于该曲线上,直到二点在曲线上重合成一点。
但如此一来,矛盾必然产生,这么多年来,人们居然没有注意到,曲线上某点的切线的斜率只要求切线与曲线有一个共同点,而斜率所必需的另一点根本不在、也不可能在曲线上。
它只能是在作为该曲线某点的切线的直线上。
明确说,就是在该曲线之外。
因此,牛顿等的传统方法始终囿于曲线上的二点相互靠近的方法,只能是或者无端舍弃不可排除的误差,或者得到0/0的非法运算来得到正确的精确导数。
这尽管在实际操作层面上可行,但在基本理论上不通。
总之,当曲线上的Δx=0时,切线上的(曲线外的)Δx′完全可以甚至必须不等于0,Δx、Δx′是两回事,我们要求的实际是Δx=0时的
值,而不是
=
值。
这在以往,没有从根本上搞清楚。
至于导数
的理论解释将在下文进行进一步的讨论。
可以看出,当曲线上的Δx≠0时,
;
但在Δx=0时,
,不成立,而
显然仍有确定值,这就是Δx=0时所求的曲线在该点的切线斜率,或该点的“瞬时速度”。
总之,
并不理会Δx是否为0。
在Δx为0与不为0时,它都存在。
因此我们完全可以有把握地宣告,这一方法将彻底消除微积分导数的基础推导中的无穷小量、潜无穷疑难和由之产生的贝克莱悖论。
这是此方法与牛顿等的方法及现代微积分的ε-δ方法的根本区别,它无需人为“定义”函数的连续性等等。
对直线斜率,这里再进一步明确证明一下(其实多余)。
设:
y=bx+d,同时有y+Δy′=b(y+Δx′)+y,前式代入后式,消去同类项后,得到:
Δy′=bΔx′,即有
=b,得证。
总之,按牛顿方法可求得公式
(1),即
=2x+Δx,求的是作为曲线割线的以曲线上二点为端点的线段的斜率(见图1),但当Δx=0时,割线段收缩为曲线上的一点,
没有(为
)了。
而本文的方法实际求的是:
=2x+Δx(8)
它在Δx=0时仍成立(见图3)。
有
=2x,而不是
=2x了。
在Δx≠0时(如Δx→0的过程中),
=2x+Δx。
显然,公式
(1)中的无穷小Δx是无法舍弃的,它再小在图1中也与曲线上二点的连线为同一数量级。
显然,
不要求Δx′、Δy′分别为无穷小量,而是宏观量。
它的意义是此时刻质点突然不再受力时的直线匀速运动的速度。
总之,定义在曲线与其割线的二个交点之间的线段的斜率函数(A函数,或称为变速运动时实际存在着的平均速度函数),是以曲线与其割线的两个交点为自变量的复合函数,它在这二点重合时(成为切点)无值。
而且它无论与曲线的切线的斜率函数(B函数,即瞬时速度函数,只以曲线上的一点(切点)为自变量),还是与定义域不受这个曲线与其割线的两个交点的限制并可以过渡到曲线的切线(当然只与该曲线交于一点,即切点)的斜率函数(C函数,变速运动时的实际平均速度也就是A函数的扩展函数,在二或一个交点时都适用)根本就不是同一个函数,尽管C函数在大多数情况下(⊿x≠0时,即在割线状态下时)与A函数的数值一样。
这也是人们长期未能严格区分它们的原因。
这里我们可以十分清晰地看出,传统理论(无论牛顿、莱布尼兹还是ε-δ法),都是在A函数下讨论问题的,但它们又都认为在曲线与其割线的两个交点合二为一时仍有值(这可看成是传统微积分理论的公理体系及其核心),这直接导致贝克莱悖论,即产生矛盾。
而在本文实际上已经提出的微积分的公理体系下(B函数,特别是C函数。
篇幅所限,不再详述),则再也不会产生悖论了。
至此,牛顿等的方法及所谓ε-δ方法对可导函数在运算上和求实际问题上是完全可以的,但在理论解释上有问题的原因已获澄清。
对比公式
(1)和公式(5)可以看出,牛顿方法中Δx=0(公式
(1))即公式(5)中的
,即b2=4ac,但牛顿实际求出的是作为切线的直线的斜率b=
,而不是Δx=0时曲线上割线的
,清楚此点后,牛顿方法在操作意义上就可以放心使用了。
虽然如此,但实际我们可以有更易理解的方式。
见图4。
此实际就是中值定理的结果。
我们完全可以不像图1那样,令B点趋向A点,曲线的割线旋转,斜率变化。
而是沿箭头方向平推,直线斜率保持不变。
A、B点最后汇集于C点(割线变切线)。
此时依赖于曲线上A、B二点作为端点的
,变成
,无意义;
但不依赖A、B点作为端点的割线斜率
在成为切线后仍有值,而在割线状态时,
,都是平均速度,不过一个仅限于曲线范围(定义域仅在曲线定义域内),另一个可以不限于曲线的定义域范围而已。
当割线(平均速度)变到切线(瞬时速度)时,斜率数值不变,完全不用考虑什么极限。
ε-δ、潜无穷、无穷小等等,这一过程的描述,更能突出本文的导数求导思想与牛顿法及ε-δ法的本质区别,也更好理解。
我们可以理解成是用一个更直接了当的方式,彻底摒弃潜无穷、无穷小、极限之类的概念,而得到中值定理。
当然,每一种新的思路与方法,都应该能够解决哪怕是部分原先的理论所解决不了的问题。
比如所谓函数在某点或处的连续但不可导的问题,分形的不可导问题等,我们应认为现之所谓的“不可导”,实际只能是指在牛顿法或ε-δ方法下不可导。
这反映了这类方法的局限性。
本质是:
如果求导必须依赖函数上二点的相互无限接近,当函数在某点附近的振荡频率趋于无穷时,自然找不到导数所要求的函数的单值性,所以“不可导”。
但在本文提出的思路及方法下,仅只求函数曲线上一点的切线,只要函数在该点连续就应该有导数,原则上也应能被求出。
或虽不好求或全部求出,但可证导数肯定处处存在。
就如无理数无法全部列出,但肯定完备一样。
即如果在某函数曲线的某点处,函数“振荡”次数趋于无穷,传统上这当然不可导。
但既然“允许”函数趋向某点时可以“振荡”无穷次,那其“波长”也应被“允许”是趋于无穷小的。
虽如此,但其毕竟还是波长,还是连续的,也就应有定义在无穷小区间上的拐点及其位置处的切线,也就是导数,除非不承认这种无穷次振荡的函数存在。
此种思想,可能也可用到测度、积分理论上。
更深入的研究与讨论,完全是可以期待的,本文只是抛砖引玉。
图4
图5
四、对一些基本概念(速度、瞬时速度、平均速度)的更详细、严格的讨论
还是先从前文已详细讨论过的贝克莱悖论开始。
如:
在二次曲线y=x2下,有Δy=2x·
Δx+Δx2,在Δy、Δx→0而不等于0时,都对。
也可以说Δx决定Δy值。
但当Δx=0时,上式为:
0=2x·
0+x·
0,也对,即纵、横坐标的增量都没有了,割线的二交点汇集到二次曲线上的一点。
但一旦把Δx除到等式左边的分母上,就有
=2x+x·
0=2x,在增量Δx为0时,2x是什么?
不好解释了。
如果我们像牛顿一样,给Δy、Δx赋与物理意义,这反映了在Δx即时间增量(进程)为0时,即在某时刻,y=x2曲线(可理解成有加速运动)上的增量也自然为0,其比0/0不存在。
但该点(瞬时、时刻)究竟还有没有
、
值?
(其中Δy′、Δx′;
dy′、dx′为切线、割线上的,所涉及的二点与曲线可以无关且任意,见前文)。
显然,Δx、Δy直接与曲线上的二点相对应,当然都是可以为0(曲线上二点化一点)的,但此时其比值
不成立。
中的dy、dx,尽管我们可以认为其为无穷小量,但由于前文理由,此时贝克莱悖论仍存在,即存在一个等式右边的无穷小量dx的与等式左边分母上的无穷小量dx不能同时舍弃或不舍弃的问题。
唯一可以保证逻辑上无问题的,唯有
及
值,它们与曲线上二点直接相关的Δx、dx等于0与否无关。
它们唯一地决定于曲线上的一点而非两点,即与切线相交的那一点,另一点无论远近,都明确在曲线之外、切线之上。
而非曲线上“真实的运动”。
真实运动的轨迹与时间的比为平均速度,而直线(切线)上的斜率处处一样,自然在该点也一样。
除该点外,与曲线y=x2无任何关联。
这就是曲线上该点的“瞬时速度”概念,即在Δx=0时刻,物理质点如突然不再受力,该质点将沿该直线(切线)运动而脱离曲线y=x2。
在这个意义上,瞬时速度也是“真实的”。
但如果实际的运动轨迹是曲线y=x2,物理上即是质点始终受力,则此时的“瞬时速度”,即不是现实中的速度,因为即使一个无穷小的时间“进程”,也有无穷小的速度增量。
加速度及速度增量是无法用令时间间隔Δx→dx即达到无穷小而不等于0来彻底消除的。
我们可以十分尖锐地以一个实例来揭示此问题:
设一个匀速运动的质点,在某时刻受到一个瞬时力,产生瞬时加速度(无论是改变运动方向还是运动速度),请问,该时刻(瞬时)的速度、加速度为何?
由于该质点受瞬时力后,运动轨迹或其速度矢量图将出现折线,转折点即受力点,如图5。
因此,该点的速度是A点后的折线(实线3),还是A点后的延长线(虚线2)、还是A点前一刻的实线1?
不彻底搞清“瞬时速度”、“瞬时加速度”等概念,此问题别看简单,却很难回答。
事实上,此问题在本文之前,别说回答,甚至都未见提出。
我们说,在理论上,某绝对意义的瞬时、时刻,只能有一个物理动作、事件发生。
在绝对意义的该时刻,不可能又启动施力,同时又撤消该力。
换言之,该“瞬时力”的撤除或消失,必在理论上的下一时刻,而无论这一时段多短。
也就是说,既然“产生”、“发生”属于这一时刻了,那“撤除”、“消失”只能属于下一时刻。
总之,任何力,从产生、存在到消失都必须要有一个时段,尽管此时段在理论上可以无穷小下去,但必存在于两个时刻、两个瞬时之间。
一个绝对意义的抽象的“脉冲”,只可能属于一个抽象意义的时刻,而一个时刻不可能同时又有、同时又无脉冲。
无脉冲的只能是下一时刻。
在此意义上,图5的折线实际放大来看在折点A处是弯曲的,如图6①,即使力为绝对意义的、抽象的脉冲(作用时间间隔为0),也是图6②的情况。
图6
总之,A、B分别为不同的时刻,无论其间隔可以多小,A为开始施力处,B为力的撤消处。
如此我们可以看出,所谓A点(时刻)的“瞬时加速度”,使其后的B点(时刻)速度改变或运动方向改变了,因此A点(时刻)的瞬时速度不应该是图中A点后的实线3了,而只能是实线1或虚线2,其二者实际是一回事,只不过解释稍有不同,即实线1的解释是:
A点(时刻)的瞬时速度,是施力前的质点速度;
而虚线2的解释是:
A点(时刻)的瞬时速度,是在A点如该瞬时力未实施时的A点后的速度。
这二种解释当然是同一个事物的两面。
由此,我们可以看出,在匀速直线运动时,由于平均速度与瞬时速度完全一样,因此尽管本质上速度概念要涉及一个时间段(再小也要有),因此仍然存在何为“瞬时速度”的问题,但它被掩盖了,而且无足轻重。
但在变速(加速)运动时就完全不一样了,此问题再也含糊不下去了。
否则就会产生贝克莱悖论。
而笔者由一个新的微积分导数的求解思路进而引伸出的对瞬时速度的理解与定义,既可以使无时间段大小的瞬时(时刻)速度在曲线运动、加速运动时有定义(定义在抽象的时间点即时刻上,而不是时间段上(哪怕再小)),又使速度(任何速度,无论平均、瞬时、加速、曲线等)的需要一个时段的本质得以被解释及说明,而在传统微
积分理论中,此二者是直接矛盾的。
所以我们说,传统微积分的问题,并不仅限于微积分,实际上它是对这些基本概念没有厘清的必然结果。
下面,我们根据以上分析,给出曲线运动或有加速度时的瞬时速度的一个完整定义:
曲线运动、加速运动时的瞬时速度,是指该时刻如果施于运动质点的力突然撤消时(后)的质点作匀速直线运动的速度;
或在该时刻一个匀速直线运动突然被施力加速时,施力加速前一时刻的速度(对应图上实线1)。
或为与前一定义统一,我们也可认为是如果在该时刻本应施加的力未施加时的(还未施加就被撤消了)匀速直线运动速度(对应图中虚线2)。
注意,此时虽然名为“瞬时速度”,其本质仅是在运动
图7
曲线上该点(瞬时)的切线上的二点间(二时刻间)、但此二点在切线上并不固定而可随意选定的匀速直线运动速度,此切线的一点与所论曲线相交,另一点无论远近,都在所论曲线之外。
以上,我们用曲线运动时在某瞬间突然不受力后的质点运动状态,来定义该瞬间的“瞬时速度”。
但还应回答为什么质点在该瞬时突然不受力,质点会沿切线方向运动。
以下给一证明。
证明曲线上某点上的质点如突然不受力,只能沿切线方向运动:
曲线上某点的切线与曲线只有唯一交点。
在此点,物理质点受力则作曲线运动,不受力则作切线方向的直线匀速运动,所以不可能沿其它直线运动。
其它直线,不是与曲线不相交(无关),就是与曲线有两个交点,而后者意味着,一个沿曲线正向运动或反向运动的质点,不受力后比始终受力的情况弯折度还大。
如图7,显然不合理。
总之,以往的微积分理论之


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 微积分 求导 公式 一种 全新 推导 模式 贝克 悖论 彻底 消除
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 建筑工程编制依据及概况.docx
建筑工程编制依据及概况.docx
-
建筑工程质量控制点土建类.docx
-
建筑设计师的总结报告最新版.docx
-
建筑制图基础机考网考题库及复习资料.docx
-
健身房经营管理方案之欧阳科创编.docx
-
江苏省计算机二级VB考试真题及参考答案.docx
-
江西省新余市事业单位《职业能力测验》教师教育与答案.docx
-
交通信号灯及路灯施工方案.docx
-
教改课题申报书填写技巧.docx
-
教师读书活动总结4篇.docx
-
教师考核表评语.docx
-
幼儿园园务工作总结.docx
-
幼儿园中班配班个人工作计划范文五篇.docx
-
幼教考试作文写作.docx
-
热门财务述职报告锦集5篇.docx
-
人教 模块一Unit1 学案.docx
-
人教版 九年级上册 新初三暑假衔接课程 圆 第一二课时 含习题和答案教育文档.docx
-
人教版地理初二上学期综合检测卷一含答案.docx
-
人教版高二英语选修7单词表doc.docx
-
商务与经济统计作业仅供参考.docx
-
上半年安徽省安全工程师安全生产法行政处罚的概念试题.docx
-
上半年贵州省安顺市平坝区事业单位《职业能力倾向测验》试题及答案.docx
-
学年高中英语高考提能练Unit1Schoollife仿真检测灵活拆组卷牛津译林版必修1.docx
-
学年家长学校工作总结.docx
-
THE PORTABLE WEBSITE.docx
-
学校教务处工作总结4篇.docx
-
学校组织一次义卖会方案.docx
-
XX规划局大型展览馆改扩建工程项目可行性研究报告.docx
-
验工计价管理办法.docx
-
XX农家乐生态园投资经营项目商业计划书.docx
-
液晶材料市场分析报告.docx
-
XX乡村电子商务服务站项目投资建设运营方案.docx
-
SDHFSOPT013抹面胶浆检验作业指导书1教程文件.docx
-
盾构机液压系统原理.docx
-
安徽公务员考试《行测》通关模拟试题及答案解析46 3.docx
-
XX年中小学教师年度考核表个人总结.docx
-
二级综合医院评审自评报告空表.docx
-
发展战略科学发展实施方案最全版.docx
-
法制小学国旗下讲话.docx
-
安徽地震监测概况.docx
-
安利中国市场运作的这七大系统.docx
-
防火防爆技术及管理措施最新版.docx
-
房屋出租合同范本集合15篇.docx
-
放线测量记录表图表1.docx
-
分享最新经典管理学工具方法理论大全.docx
-
安全管理制度上墙.docx
-
安全生产大检查个人自查反思材料.docx
-
佛山小升初名校历年试题汇编语文.docx
-
安全生产责任管理制度范本.docx
-
安全生产应急标语经典用语大全安全生产.docx
-
福建省建筑工程文件管理规程施工分册表格.docx
