 马达惯量计算方法.docx
马达惯量计算方法.docx
- 文档编号:16031627
- 上传时间:2023-07-10
- 格式:DOCX
- 页数:41
- 大小:332.89KB
马达惯量计算方法.docx
《马达惯量计算方法.docx》由会员分享,可在线阅读,更多相关《马达惯量计算方法.docx(41页珍藏版)》请在冰点文库上搜索。
马达惯量计算方法
附录
■容量选择计算
■电脑编程器
■参数表
⏹
容量选择计算
(1)机械系统的种类
用可变速电机驱动的机械系统,一般有以下几类。
机构
特点
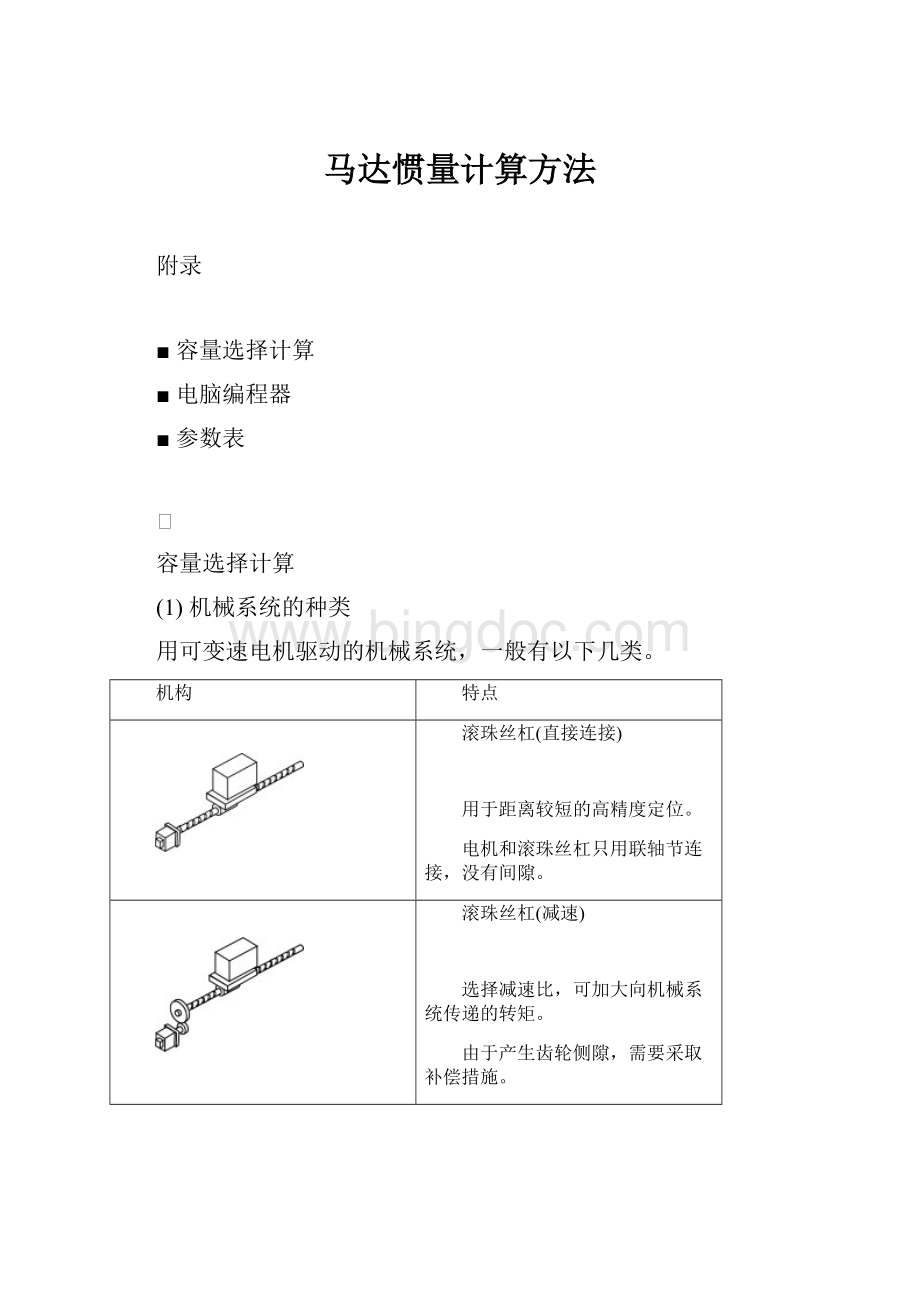
滚珠丝杠(直接连接)
用于距离较短的高精度定位。
电机和滚珠丝杠只用联轴节连接,没有间隙。
滚珠丝杠(减速)
选择减速比,可加大向机械系统传递的转矩。
由于产生齿轮侧隙,需要采取补偿措施。
齿条和小齿轮
用于距离较长的(台车驱动等)定位。
小齿轮转动一圈包含了π值,因此需要修正。
同步皮带(传送带)
与链条比较,形态上的自由度变大。
主要用于轻载。
皮带轮转动一圈的移动量中包含π值,因此需要修正。
将伺服系统用于机械系统中时,请注意以下各点。
①减速比
为了有效利用伺服电机的功率,应在接近电机的额定速度(最高旋转速度)数值的范围使用。
在最高旋转速度下连续输出转矩,还是比额定转矩小。
②预压转矩
对丝杠加预压力,刚性增强,负载转矩值增大。
由预压产生的摩擦转矩,请参照滚珠丝杠规格书。
③保持转矩
升降机械在停止时,伺服电机继续输出保持力。
在时间充裕的场合,建议使用保持制动。
机构
特点
链条驱动
多用于输送线上。
必须考虑链条本身的伸长并采取相应的措施。
在减速比比较大的状态下使用,机械系统的移动速度小。
进料辊
将板带上的材料夹入辊间送出。
由于未严密确定辊子直径,在尺寸长的物件上将产生误差,需进行π补偿。
如果急剧加速,将产生打滑,送出量不足。
转盘分度
转盘的惯性矩大,需要设定足够的减速比。
转盘的转速低,多使用蜗轮蜗杆。
主轴驱动
在卷绕线材时,由于惯性矩大,需要设定够的减速比。
在等圆周速度控制中,必须把周边机械考虑进来研究。
<参考>
材质密度
摩擦系数μ的目标值
机构
摩擦系数
轨道和铁车轮
(台车,吊车)
0.05
直线导轨
0.05~0.2
滚珠花键轴
滚柱工作台
滚柱系统
材质
密度:
kg/m3
铜
8.96×103
黄铜
8.54×103
不锈钢
7.91×103
铁
7.85×103
铝
2.7×103
聚缩醛
1.43×103
机械效率η的目标值
机构
机械效率
台式丝杠
0.5~0.8
滚珠丝杠
0.9
齿条和小齿轮
0.8
齿轮减速器
0.8~0.95
蜗轮减速器(起动)
0.5~0.7
蜗轮减速器
(运行中)
0.6~0.8
皮带传动
0.95
链条传动
0.9
(齿轮节圆直径)
模数
(齿数)
(模数)= ———————————————
※公制齿轮
※模数
0.50.750.811.522.534567
链条尺寸
编号
刻度
编号
刻度
15
4.762
80
25.4
25
6.35
100
31.75
35
9.525
120
38.1
40
12.7
140
44.45
50
15.875
160
50.8
60
19.05
180
57.15
(2)容量选择计算
容量选择计算,是由机械规格(构成)计算出必要的伺服电机容量的计算。
容量选择计算所需要的项目如下。
・负载惯性矩(机械系统的惯性矩)
・负载转矩(驱动机械所需的转矩)
・加速/减速时间
・运行模式
一般地说,由于不能测定系统惯性矩和负载转矩。
因此,由机械的构成计算出近似值。
容量选择计算的次序如下。
容量选择流程图
绘制转矩特性曲线
计算负载惯性矩
结束
重新审定机械规格,
变更运行模式
计算再生电力
计算实际的转矩
计算最短加速/减速时间
(计算加速/减速转矩)
临时选定电机容量
计算负载转矩TL
开始
①由机械构成计算负载惯性矩。
②由机械构成计算负载转矩。
③临时选定电机容量。
④确认最短加速/减速时间。
指定时间时,计算必要的加速/减速转矩。
⑤由运行模式绘制转矩特性曲线。
⑥由转矩特性曲线计算出实际转矩。
⑦如果实际转矩(Trms)比额定转矩(TR)小,则可按指定的运行模式运转。
⑧计算再生电力,必要时选择再生电阻器。
⑨在可能范围内,重新审定机械规格。
<惯性矩计算>
・形状
・换算
滚珠丝杠
2
BP
1
×
×GL2
=
J1
103
2π
W
W:
可动部分总重量[kg]
BP:
丝杠螺矩[mm]
GL:
减速比(无单位)
齿条和小齿轮·传送带·链条传动
2
BP
1
×
×GL2
103
2π
=
J1
W
W:
可动部分总重量[kg]
小齿轮直径[mm]
D:
可动部分总重量[kg]
:
物体与旋转轴的距离[mm]
L
W:
通过物体重心的惯性矩
GL:
减速比(无単位)
J:
GL:
减速比(无单位)
W:
物体的重量[kg]
4
链轮直径[mm]
D
处在离开旋转轴位置的某一物体的惯性矩(J4)
求出惯性矩作为各自形状之和。
旋转体·转盘驱动
进料辊
GL:
减速比(无单位)
:
辊子直径[mm]
+W
×GL2
=
J4
2
103
L
J
×GL2
2
103
D
W
=
J3
丝杠螺矩
L
电机轴旋转速度
N
减速比
GL
可动部分重量
W
移动速度
V
<负载转矩(TL)计算>
滚珠丝杠
μ:
摩擦系数 BP:
丝杠螺矩[mm]
W,W1:
可动部分重量[kg]
W2:
配重重量[kg]
GL:
减速比(无单位) F:
推力[kg]
・上升时(垂直)
・下降时(垂直)
・停止时(垂直)
电机轴旋转速度
N
减速比
GL
移动速度
V
小齿轮直径
D
传送带·齿条和小齿轮
μ:
摩擦系数 D:
直径[mm]
W,W1:
可动部分重量[kg]
W2:
配重重量[kg]
GL:
减速比(无单位)
・上升时(垂直)
・下降时(垂直)
・停止时(垂直)
可动部分重量
W
①计算负载惯性矩(JL)
计算对于电机轴换算的机械系统负载惯性矩(GD2)。
计算电机旋转时随转动(移动)部分的惯性矩,并求出总和。
②计算负载转矩(TL)
计算对于电机轴换算的负载转矩。
③临时选定电机容量
选定满足以下两个条件的电机容量。
■允许用负载惯性矩
JL≦JM×100(30)在速度控制中缓慢移动时
JL≦JM×30(10)在位置控制中定位时
JL≦JM×10(-)进行高频度定位时
(参考值:
在0.5秒内,运转/停止一次以上)
※()内的数值、是使用GYG电机时的值。
■负载转矩
TL≦TR×0.90.9是安全系数(例子)
④计算最短的加速/减速时间(计算加速/减速转矩)
确认考虑负载条件的最短加速/减速时间。
指定加速/减速时间时,计算加速/减速转矩。
(JM+JL)×2π×(N1-N0)
60(TAC-TL)
tAC=
・最短加速/减速时间
+TL
(JM+JL)×2π×(N1-N0)
60(tAC)
TAC=
・加速/减速转矩
tAC:
加速/减速时间[s]
JM:
伺服电机惯性矩[kg·m2]
JL:
对电机轴换算的负载惯性矩[kg·m2]
TL:
对电机轴换算的负载转矩[Nm]
TAC:
加速/减速转矩[Nm]
N1:
変速後の回転速度[r/min]
N0:
変速前の回転速度[r/min]
⑤绘制转矩特性曲线
由运行模式,绘制输出转矩特性曲线。
●转矩特性曲线
●运行模式
移动速度
输出转矩
时间
时间
TL:
负载转矩
TDC:
减速转矩
TAC:
加速转矩
⑥计算实际转矩(Trms)
计算运行模式1个循环的实际转矩。
(TAC2×tAC)+(TL2×tL)+(TDC2×tDC)
tCYC
Trms=
将各输出转矩的平方与输出时间之积相加,再将所得之和除以1个循环的时间,然后开平方,所得平方根值为实际转矩值。
⑦Trms≦TR
如果实际转矩小于额定转矩,则可以按指定的运行模式连续运行。
⑧计算再生电力
一般在下述状态下进行再生运行。
水平方向进给:
减速时
垂直方向进给:
下降时以一定速度进给以及在减速时。
减速时的再生电力(P1)
P1[W] = (2π/60)×TDC[Nm]×N1[r/min]×(1/2)
下降时以一定速度进给(P2)
P2[W] = (2π/60)×TDC[Nm]×N1[r/min]
计算运行模式1时,循环时的平均再生电力(P),确认再生电阻容量下降。
如果升高,则应适当选用外部再生电阻。
(P1[w]×t1[s]+P2[w]×t2[s] )
tCYC[s]
P[W]=
⑨运行模式/机械构成的重新审查
当Trms大于TR时,重新审查以下项目。
・在允许范围内,将加速/减速时间加长一些。
・延长运转频率(1循环时间)。
・当旋转速度有余量时,加大减速比。
・加大电机容量。
・当升降机械停止时间长时,加机械制动。
・在高频率运行时,尽量加大减速比,减小惯性矩。
(3)容量选择计算实例
■机械构成
减速比1/1(直接连接)
伺服电机
丝杠螺距10mm、输送重量20kg、推力0kg(无)
①最大移动速度(v)
减速比1/1、电机轴旋转速度3000[r/min]时:
V=(3000/60)×10×(1/1)=500[mm/s]
②对电机轴换算的负载惯性矩(JL)
・假定丝杠(J1) φ20、长度为500mm。
×(1/1)2
=
0.6 ×10-4[kg·m2]
4
πρ
32
D1
1000
GL2
J1=
L
1000
π×7.85×103
32
20
1000
4
=
500
1000
×
1
BP
×(GL)2
×(1/1)2
=
0.5 ×10-4[kg·m2]
W
J2=
2π
2
1000
20
=
1
2π
2
10
1000
・假定可动部分(J2) 输送重量20kg。
JL=
1.1×10-4 [kg·m2]
③对电机换算的负载转矩(TL)
假定输送重量20kg、摩擦系数(μ)0.1、机械效率(η)0.9。
= 0.03[Nm]
(μW+F)×9.81
2πη
BP
1000
×GL
TL=
(0.1×20+0)×9.81
2π×0.9
10
1000
×(1/1)
GL
=
④容量选择条件
TL≦TR×0.9
JL≦JM×5(高频率进给)
TL=0.03[Nm]
JL=1.1×10-4[kg·m2]
⑤临时选择
从容量选择条件,得到GYS201DC2-T2A(0.2kW)。
(JM=0.135×10-4[kg·m2],TR=0.637[Nm],TAC=1.91[Nm])
⑥最短加速/减速时间(tAC)
(JM+JL)×2π×N
60(TAC-TL)
tAC=
=
60(1.91-0.03)
= 0.021[s]
(0.135×10-4+1.1×10-4)×2π×3000
加速/减速时间为0.05秒时的加速/减速转矩:
(JM+JL)×2π×N
60(tAC)
+TL
TAC=
=
+0.03
60×0.05
(0.135×10-4+1.1×10-4)×2π×3000
=0.78[Nm]
⑦运行模式
50[mm]
0.05
0.05
0.05
速度
时间
500[mm/s]
转矩
时间
0.03
0.78
0.78
※这是容量选择上的模式。
假设1个运行周期为0.5秒。
⑧实效转矩(Trms)
为输出转矩的时间平均值。
tCYC
Trms=
0.5
=
= 0.25[Nm]
TAC2×ta+TL2×tL+TDC2×td
(0.782×0.05)×2+(0.032×0.05)×1
由于GYS201DC2-T2A型号的额定转矩在0.637[Nm]以下,可以用指定的运行模式连续运行。
⑨选择结果
伺服电机:
GYS201DC2-T2A (0.2kW)
⑩再生电力
在减速时,再生电力返回。
P1[W] = (2π/60)×T[Nm]×N[r/min]×(1/2)
= (2π/60)×0.78×3000×(1/2)
≒ 123[W]
1循环运行时的平均再生电力、
P = (123×0.05)/0.5
≒ 12.3[W]
RYC201D3型伺服放大器,没有安装再生电阻器。
考虑是否需要再生电阻器。
步骤1)求减速时机械系统保持的能量(EG)。
1
2
(JM+JL)・(2πN/60)2
EG=
= 6.1[J]
=
2π×3000
60
2
(0.135×10-4 +1.1×10-4)×
1
2
步骤2)根据负载转矩,计算消耗的能量(EL)。
EL=(2π/60)×TL×N×tDC×(1/2)
=(2π/60)×0.03×3000×0.05×(1/2)
= 0.24[J]
步骤3)计算由伺服电机绕组线所消耗的能量(EM)。
EM=3×(R×I2)×tDC
=3×R×((TDC/TR×IR)2)×tDC
=3×2.3×((0.78/0.637×1.5)2)×0.05
=1.2[J]
※GYS201DC2-T2A型号的相电阻2.3Ω
※相电阻值
步骤4)计算伺服放大器可能吸收的能量(ES)。
2
CV2
ES=
= 22.5[J]
1
2
(660×10-6)× (3852-(200×21/2)2)
=
1
※直流中间电容器(RYC201)660μF、电源电压200V(有效值)
※0.2kW以下伺服放大器的电容器为660μF。
由机械系统、伺服放大器和伺服电机能够处理的能量:
EL+EM+ES=0.24+1.2+22.5 ≒24[J]
由于EG=6.1[J],因此不需要外部再生电阻器。
⏹
电脑编程器
FALDIC-W适用的电脑编程器软件,可从本公司的内部网页下载。
http:
/www.fujielectric.co.jp/fcs/
利用电脑编程器,可进行以下设定。
①实时跟踪可连续获得速度和转矩波形。
②历史跟踪可从实时跟踪得到短时间的详细波形。
③监控器2可监视I/O确认、报警记录和系统构成。
④参数编集进行关于参数的编集、传送、比较和初始化。
⑤通信设定设定伺服放大器和电脑编程器之间的通信条件。
⑥简易调整通过简单设定,使伺服电机自动往复运行,调整适合于机械系统的自
动调谐增益。
⑦伺服分析器检查机械系统的共振点/反共振点。
也可以确认陷波滤波器的效果。
工作环境
OS环境Windows98SE,WindowsNT4.0/WS(服务程序包4以上),
Windows2000,WindowsME,WindowsXP
CPU推荐Pentium133MHz以上
内存环境32M字节以上
显示器具有与Windows对应的800×600以上SVGA析象清晰度的显示器。
安装环境40M字节以上的硬盘驱动备用容量(推荐80M字节以上)
⏹
参数表
⏹FALDIC-W参数一览表
(1)
编号
名称
设定范围
设定值
变更
01
命令脉冲补偿α
1~32767(1刻度)
一直
02
命令脉冲补偿β
1~32767(1刻度)
一直
03
脉冲串输入形式
0:
命令脉冲/命令符号
1:
正转脉冲/反转脉冲
2:
90度相位差2路信号
电源
04
旋转方向切换/输出脉冲相位切换
0:
正向正转(CCW)(逆时针)/B相进给
1:
正向反转(CW)(顺时针)/B相进给
2:
正向正转(CCW)(逆时针)/A相进给
3:
正向反转(CW)(顺时针)/A相进给
电源
05
调整模式
0:
自动调整
1:
半自动调整
2:
手动调整
一直
06
负荷惯性比
GYS型号:
0.0~100.0倍(0.1刻度)
GYG型号:
0.0~30.0倍(0.1刻度)
一直
07
自动调谐增益
1~20(1刻度)
一直
08
自动前进增益
1~20(1刻度)
一直
09
控制模式切换
0:
位置1:
速度
2:
转矩3:
位置↔速度
0~21(1刻度)
4:
位置↔转矩5:
速度↔转矩
电源
10
0:
无指定
2:
复位[RST]
4:
-OT
6:
P动作
8:
外部再生电阻热
10:
反共振频率选1
12:
命令脉冲α选0
14:
控制模式切换
16:
手动反转[REV]
18:
多段速度2[X2]
20:
电流限制有效
CONT1信号分配
1:
伺服ON[RUN]
3:
+OT
5:
紧急停止[EMG]
7:
清除偏差
9:
反共振频率选择0
11:
禁止命令脉冲
13:
命令脉冲α选择1
15:
手动正转[FWO]
17:
多段速度1[X1]
19:
加减速时间选择
21:
空转[BX]
电源
11
CONT2信号分配
电源
12
CONT3信号分配
电源
13
CONT4信号分配
电源
14
CONT5信号分配
电源
15
0:
无指定
2:
定位结束[PSIT]
4:
报警检出
6:
OT检出
8:
零偏差
10:
电流限制检出
OUT1信号分配
1:
准备就绪[RDY]
3:
报警检出:
a接点
5:
发电制动
7:
强制停止检出
9:
速度零
11:
制动同步
0~10(1刻度)
电源
16
OUT2信号分配
电源
17
OUT3信号分配
电源
18
OUT4信号分配
电源
19
输出脉冲数
16~32768[脉冲](1刻度)
电源
20
Z相偏差
0~65535[×2脉冲](1刻度)
电源
21
零偏差幅度
1~2000[脉冲](1刻度)
一直
22
超偏差程度
10~65535[×100脉冲](1刻度)
一直
23
零速度幅度
10~最大转速[r/min](1刻度)
一直
24
定位结束判定时间
0.000~1.000秒(0.001刻度)
一直
25
最大电流限定值
0~300%(1刻度)
一直
⏹FALDIC-W参数一览表
(2)
编号
名称
设定范围
设定值
变更
26
电压不足时报警检出
0:
不检出1:
检出
电源
27
电压不足时启动
0:
急减速停止1:
空转
电源
28
制造商调整用
-
-
29
禁止重写参数
0:
可重写1:
禁止重写
一直
30
触摸面板初始显示
0~20(1刻度)
电源
31
手动进给速度1
(兼试运行)
0.1~最大转速[r/min](0.1刻度)
一直
32
手动进给速度2
0.1~最大转速[r/min](0.1刻度)
一直
33
手动进给速度3
0.1~最大转速[r/min](0.1刻度)
一直
34
最大转速
0.1~最大转速[r/min](0.1刻度)
一直
35
加速时间1(兼试运行)
0.000~9.999秒(0.001刻度)
一直
36
减速时间1(兼试运行)
0.000~9.999秒(0.001刻度)
一直
37
加速时间2
0.000~9.999秒(0.001刻度)
一直
38
减速时间2
0.000~9.999秒(0.001刻度)
一直
39
零箱位电平
0.0~500.0[r/min](1刻度)
一直
40
位置调节器增益1
1~1000[rad/sec](1刻度)
一直
41
速度应答1
1~1000[Hz](1刻度)
一直
42
速度调节器积分时间1
1.0~1000.0[msec](0.1刻度)
一直
43
S字时间常数
0.0~100.0[msec](0.1刻度)
一直
44
前馈增益
0.000~1.500(0.001刻度)
一直
45
前馈过滤器时间常数
0.0~250.0[msec](0.1刻度)
一直
46
转矩过滤器时间常数
0.00~20.00[msec](0.01刻度)
一直
47
速度设定过滤器
0.00~20.00[msec](0.01刻度)
一直
48
增益切换主要原因
0:
位置偏差(×10)1:
反馈速度
2:
命令速度
一直
49
增益切换水平
1~1000(1刻度)
一直
50
增益切换时常数
0~100[msec](1刻度)
一直
51
位置调节器增益2
30~200%(1刻度)
一直
52
速度应答2
30~200%(1刻度)
一直
53
速度调节器积分时间2
30~200%(1刻度)
一直
54
转矩设定过滤器
0.000~9.999[sec](0.001刻度)
一直
55
命令跟踪控制选择
0:
无1:
命令跟踪控制
2:
命令跟踪控制(停止时有补偿)
电源
56
陷波滤波器1频率
10~200[×10Hz](1刻度)
一直


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 马达 惯量 计算方法
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《保险学概论》期末复习指导书蓝本答案要点.docx
《保险学概论》期末复习指导书蓝本答案要点.docx
-
《读李白诗歌 品太白遗韵》.docx
-
《海底两万里》读书笔记800字.docx
-
《经济法基础》考试真题及答案921.docx
-
《石灰吟》教学设计部编版1.docx
-
《数字化测图》课程标准.docx
-
#网上购物系统需求分析.docx
-
《大棚蔬菜》教案doc.docx
-
《各具特色的民居》综合资料.docx
-
#加强中小型企业人力资源管理的对策思考.docx
-
《计算机文化基础wordl》课程单元教学设计.docx
-
《不会叫的狗》教案 人教部编版1.docx
-
《菜根谭》注译四闲适篇.docx
-
《反不正当竞争法》下互联网平台封禁行为考辨以消费者用户合法权益保护为中心.docx
-
《福尔摩斯探案集》读后感15篇.docx
-
《荷叶圆圆》公开课教案优秀教学设计26.docx
-
《操作系统》二学期A卷及答案.docx
-
《科技出行研究报告》智能网联与新能源将变革未来汽车出行.docx
-
《红对勾》古代诗歌选择题答案补充.docx
-
《傅雷家书》名著阅读笔记.docx
-
《课堂密码》读后感及心得精选多篇.docx
-
《时间旅行者的妻子》中英文剧本.docx
-
《化工原理》第六章蒸发.docx
-
《你若安好便是晴天林徽因传》序.docx
-
《蓝海战略》概要11页.docx
-
《体育科学》论文格式.docx
-
《劝学师说赤壁赋登泰山记》文言现象翻译简答题.docx
-
《微观经济学》期末试题.docx
-
《微机测控系统原理与设计》习题解答.docx
-
《扫雪心得体会》.docx
-
《质量处理学》学习规划.docx
-
《物质的密度》教案.docx
-
教师外出培训心得3篇(共8页)4900字.docx
-
解放思想大讨论发言稿精选范文五篇(共16页)10200字.docx
-
经典搞笑创意广告词_3篇(共2页)1200字.docx
-
精选共产党员公开承诺书范文_3篇(共3页)1500字.docx
-
咖啡的创意广告词大全(共2页)900字.docx
-
空压机设备租赁合同_3篇(共4页)2600字.docx
-
临床输血管理规定_1篇(共6页)3400字.docx
-
流行经典广告词_最流行的经典广告大全(共5页)2900字.docx
-
卖花的创意广告词_3篇(共2页)700字.docx
-
美容店的宣传广告词_3篇(共2页)900字.docx
-
面试地铁站务员自我介绍_3篇(共2页)1000字.docx
-
面试怎么自我介绍范文(共3页)1600字.docx
-
内向者面试的自我介绍_2篇(共3页)1600字.docx
-
泡妞打招呼幽默用语_3篇(共3页)1900字.docx
-
期货的经典广告词_3篇(共2页)1000字.docx
-
企业入职岗前培训心得体会3篇(共6页)3600字.docx
-
器械设备租赁合同模板_4篇(共7页)4100字.docx
-
求职简历的自我介绍_5篇(共3页)1700字.docx
-
人流的经典广告词_3篇(共2页)800字.docx
