 DTC系统软硬件结构及设计.docx
DTC系统软硬件结构及设计.docx
- 文档编号:18332689
- 上传时间:2023-08-15
- 格式:DOCX
- 页数:17
- 大小:108.97KB
DTC系统软硬件结构及设计.docx
《DTC系统软硬件结构及设计.docx》由会员分享,可在线阅读,更多相关《DTC系统软硬件结构及设计.docx(17页珍藏版)》请在冰点文库上搜索。
DTC系统软硬件结构及设计
第五章DTC调速系统软硬件结构及设计
§5.1全数字直接转矩控制调速系统结构
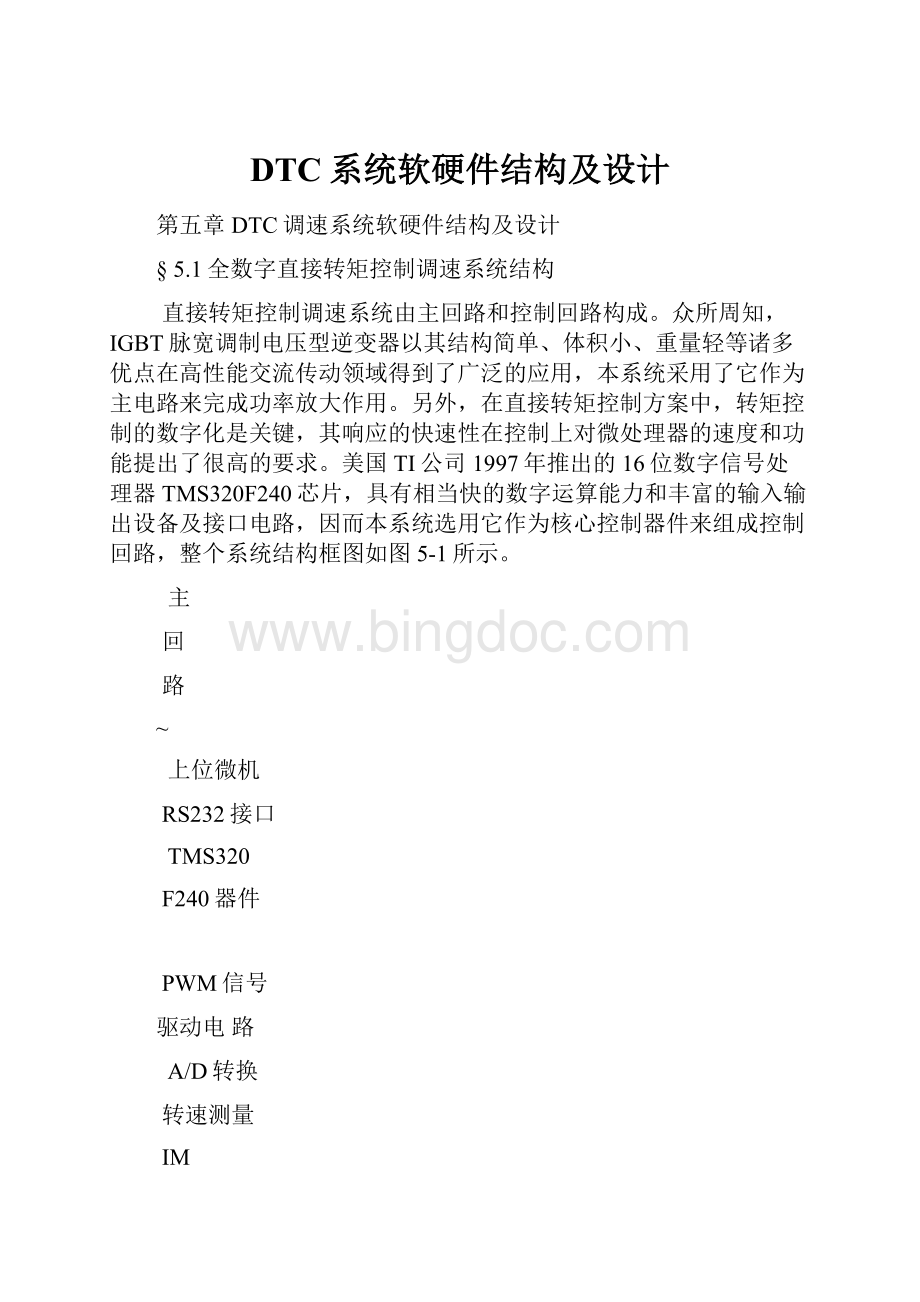
直接转矩控制调速系统由主回路和控制回路构成。
众所周知,IGBT脉宽调制电压型逆变器以其结构简单、体积小、重量轻等诸多优点在高性能交流传动领域得到了广泛的应用,本系统采用了它作为主电路来完成功率放大作用。
另外,在直接转矩控制方案中,转矩控制的数字化是关键,其响应的快速性在控制上对微处理器的速度和功能提出了很高的要求。
美国TI公司1997年推出的16位数字信号处理器TMS320F240芯片,具有相当快的数字运算能力和丰富的输入输出设备及接口电路,因而本系统选用它作为核心控制器件来组成控制回路,整个系统结构框图如图5-1所示。
主
回
路
~
上位微机
RS232接口
TMS320
F240器件
PWM信号
驱动电路
A/D转换
转速测量
IM
Ia,Ib
母线电压Ud
信号放大,滤波
图5-1系统整体结构图
§5.2硬件电路设计
5.2.1驱动电路设计
本系统IGBT的驱动采用日本富士通公司生产的专用混合IC模块EXB840,它与IGBT的连接如图5-2所示。
EXB840属于高速系列,驱动电路信号延时最大不超过1.5us,有利于减小互锁延时的设置,也可减小保护电路动作的延时时间。
它内部设有信号隔离、过流检测、低速过流切断和栅关断电压等功能。
在实际应用中,应注意以下几点:
1.驱动模块应尽可能地靠近它自己的功率模块,以缩短栅射级回路的接线。
2.在驱动模块所在的驱动板上布线时,应考虑到各模块和同一模块各管脚之间存在强电联系,并保持一定的距离。
3.由于是高频操作,驱动电阻RG的选取较推荐值也稍大。
6
152
EXB840
3
1
149
5
快恢二极管
RG
IGBT
10mA
驱动信号
20V隔离电源
过流保
护输出
0V
图5-2EXB840与IGBT的接线图
5.2.2控制电路设计
1.控制电路构成及工作原理
在第四章第二节所介绍的开发机装置硬件组成的基础上,F240芯片通过外接EPROM、RAM、晶体振荡器和地址译码电路及必要的外围接口电路,即可方便地构成直接转矩调速系统的控制电路。
在程序调试时,程序存储器(EPROM或EEPROM芯片)用来存放监控程序,而真正的直接转矩控制程序(机器码)则通过上位机由串口传送到RAM中。
GAL芯片完成地址译码,MAX233芯片用于实现TTL电平和CMOS电平之间的转换。
控制电路的工作原理如下:
通过检测两相电流Ia,Ib及电机转子转速n,由§2.3给出的公式确定磁链调节器和转矩调节器的输出,然后查开关模式表实时发出6路PWM脉冲,此脉冲经驱动电路控制相应功率管的开通与关断,从而达到调速的目的。
2.速度信号的检测
传动系统往往要求有高精度的速度检测元件。
光电脉冲编码器是一种能直接把角位移转换成数字信号的检测元件,在数字式控制系统中应用十分广泛[26]。
光电脉冲编码器一般分增量式和绝对式两种,本系统采用增量式光电编码器作为速度检测器件。
它输出两个相位相差90°的方波脉冲信号PA,PB及其非信号PA*,PB*和一个零脉冲PZ信号,其中PZ脉冲每转只出现一次,用于调整电气和机械的零位,在本调速系统中没有用到。
其它各信号每转发出2500个脉冲,为了提高分辨率,常常需对这些信号进行倍频处理。
本系统对速度信号的处理电路如图5-3所示。
D+5V_K
54321
12345
PA
4P+
D+5V_E
1AVDD
1B1Y
2A72Y
2B53Y
3A14Y
3B7E+
4A5E-
4BVSS
4P-
PB
PA*
DGND_K
PZ
PZ*
PB*
DGND_E
图5-3速度检测电路原理图
图中,信号的接收采用75175差动接收器,然后用光电耦合器PC900对接收信号与控制电路进行隔离;由于F240的正交编码脉冲单元(QEP)能够将差动信号四倍频(如图5-4所示),所以上图中两路光电耦合器的输出信号直接送入F240芯片QEP单元的输入引脚4P+与4P-,通过设置QEP单元相关寄存器的值,并利用F240片内的通用定时器T3对输入脉冲进行计数,就可以确定相应的转速值。
4P+
4P-
计数器
计数脉冲
图5-4正交编码脉冲单元将差动信号四倍频
3.交流电压的检测-间接检测法
在直接转矩控制系统中,作为状态变量的磁通和转矩是由三相相电压、相电流检测值经过一系列的运算后得到的。
感应电机交流定子电压的检测方法很多,常用的有光电耦合直接检测法和LEM电压传感器检测法两种。
后者虽然检测性能优良,但价格较高;前者则响应较慢,线性度也难以保证。
所以,在实际中采用的是间接测压方法。
其理论依据是:
根据瞬时空间矢量理论,在不考虑逆变器死区效应的情况下,三相交流电压可由直流母线电压和开关状态信息共同得到。
本系统选用的是LEM电流霍尔元件测压法,即由霍尔元件串一电阻再并接到直流电压上,通过F240芯片提供的片内A/D来检测霍尔元件感应的电流大小,从而确定直流侧电压,达到检测三相交流电压的目的。
4.定子电流的检测
定子电流由霍尔传感器检测。
本系统选用F240芯片提供的两个片内A/D转换器,分别对A相和B相定子电流进行采样,从而获得合成的定子电流信息。
5.系统保护
(1)设置死区时间
功率器件的存储效应使得它们在关断时必存在一个延迟时间即存储时间Tst,为了避免同一桥臂的两个功率器件发生直通,常常在其驱动电路中设置一个延迟时间Td(Td>>Tst)以保证器件开通时有一个安全时间,这个时间即为死区时间,通常用硬件电路(如RC电路)实现死区延时[32]。
F240芯片提供了死区控制单元(DBTCON),使得用户通过设置死区控制寄存器的内容即可精确地设置死区时间。
这种用软件实现死区延时的方法简化了硬件电路设计(硬件延时电路可省略),极大地方便了用户。
(2)硬件保护电路
由于带负载能力所限,F240芯片CMP1~CMP6引脚产生的6路PWM脉冲不能直接驱动EXB840芯片,需要经过一些逻辑门电路才能去驱动EXB840芯片。
显然,下列条件必须得到满足:
①正常工作时,6路脉冲经过这些门电路,逻辑关系不能改变
②当出现异常情况(例如过压,或者由于寄存器控制字写错而导致上,下管同时出现高电平)时,逻辑门电路能立即封锁6路PWM脉冲以保护功率管不被烧坏。
逻辑电路的原理图如图5-5所示(以一相为例)
由图可知,
(x=1~6),其中PWM1与PWM2、PWM3与PWM4、PWM5与PWM6分别是三相桥臂的某一对脉冲。
由于
正常工作时Vce为高,同一桥臂的每一对脉冲或者为反相,或者同为低(死区)。
故
这时总有
一旦某对脉冲出现了同高现象(如PWM1=PWM2="1"),这时由于
使得
=0,使得PWMx'=0,同时功率驱动保护引脚也动作,使六个PWM引脚输出高阻态。
实践表明:
所设计的逻辑电路非常灵敏有效,起了很好的保护作用。
与非门
4011
芯片
与非门
4011
芯片
反相缓冲器4049芯片
至EXB840
四输入
与门
4082
芯片
Vce保护
至
引脚(功率驱动保护中断引脚)
图5-5逻辑电路原理图
§5.3系统软件设计
5.3.1系统软件总体结构
本系统采用主从式计算机结构。
其中,上位机完成多种管理功能,下位机则完成对电机的控制。
上位机由第四章介绍的上位机程序改进而成,下位机则根据直接转矩控制算法对系统速度、转矩进行实时控制。
下位机中的控制软件可分为两组程序模块-主程序和中断服务程序。
主程序一般在完成初始化之后进入循环,以等待中断事件的发生;检测电流、转矩并发出6路PWM脉冲则在定时器下溢中断服务程序中完成。
此系统主要用到了三个中断:
串口中断、功率驱动保护中断、通用定时器T1下溢中断。
具体而言,串口中断处理从上位机发来的命令代码以完成相应的功能(如通讯握手,读取数据存储区内容等);功率驱动保护中断用于保证电机驱动系统的安全操作:
如果PDPINT引脚未被屏蔽,当其置低电平时会使相应的中断标志位EVIFRA[0]置位,从而将所有事件管理器输出脚置成高阻状态,这样就保证了系统的安全。
通用定时器T1下溢中断则保证系统每隔一定时间(设置为120us),根据直接转矩控制算法算出应作用的电压矢量并发出6路PWM脉冲;本系统采用查询法在T1下溢中断服务程序内读取A/D转换结果,完成对两相电流的采样。
整个系统软件结构如图5-6所示。
系统初始化程序模块
进入循环,等待中断
通用定时器T1中断(检测电流、转速,依据算法发出6路PWM脉冲)
功率驱动
保护中断
串行口中断(数据接收与发送)
图5-6系统程序结构及各模块关系示意图
5.3.2系统主程序模块
主程序模块主要完成初始化工作。
包括:
关闭看门狗,初始化时钟寄存器,与通用定时器相关的寄存器,全比较单元以及串口通讯模块等。
主程序模块的流程图如图5-7所示。
需要指出的是:
在指定正交解码脉冲单元(QEP)对码盘速度信号进行检测之前,必须先设置相应的I/O寄存器OCRB和PBDATDIR。
这是因为用于接收速度信号的两个引脚QEP1与QEP2是复用引脚,在默认情况下被指定为数字I/O引脚;如果不通过相应的I/O寄存器将其设置为QEP单元脉冲输入引脚,将导致F240芯片对码盘脉冲的计数值始终为零。
初始化I/O口
开始
初始化正交解码脉冲单元(QEP)
禁止所有中断
初始化串口通讯模块(SCI)
关闭看门狗
初始化时钟寄存器
清除中断标志寄存器IFR
初始化通用定时器T1各寄存器
设置中断屏蔽寄存器IMR,允许串口、通用定时器T1下溢中断及功率驱动保护中断
初始化全比较单元各寄存器
开放总中断
初始化死区控制寄存器DBTCON
循环等待
图5-7主程序模块初始化流程图
5.3.3串行口中断服务程序模块
串行口中断服务程序的功能是:
接收主机(上位机)发送来的命令,数据和参数,并进行适当的处理。
数据包的格式与各命令的含义均与第四章§4.3节中所述的一致。
为了能有效地实现此功能,串行口中断服务程序也必须严格按照第四章§4.3节中所介绍的通信协议进行编程。
这样,串行口中断服务程序通过对命令码的识别,就可以完成读数据存储区,系统速度,电流的控制等一系列复杂的功能。
5.3.4功率驱动保护中断
此中断服务程序的内容十分简单:
当发生功率驱动保护中断时,立即返回至主程序死循环处,系统将自动将事件管理器所有输出引脚置为高阻态。
5.3.5通用定时器中断服务程序模块
依照直接转矩控制算法对电机进行控制的工作完全由通用定时器中断服务程序完成。
其中速度环计算程序流程如图5-8所示,通用定时器中断服务程序模块的流程图如图5-9所示
计算速度反馈信号V
速度环计算开始
读取通用定时器T3的计数值并保存到temp单元
由V和速度给定得误差Err
由速度误差Err进行PI计算,得到转矩给定
通用定时器T3计数值清零
速度环计算结束
由temp单元内容计算0.96ms内编码器所发出的脉冲个数
图5-8速度环计算流程图
通用定时器T1
中断开始
由转矩给定,Te,定子磁链所在的扇区号,定子磁链幅值给定及其大小,查最优开关模式表得到开关状态
保护现场
读取A/D转换结果,得到两相电流ia,ib及主回路电压Ud
Y
N
过流标志置位?
判断ia,ib是否过流,若过流则设置过流标志
输出零矢量
通过全比较动作单元(ACTR)输出此开关状态
将A/D转换结果分别转换为相应的4.12格式
清除过流标志
通过计算得到
速度环0.96ms计数值到?
N
Y
按U_I模型计算得到定子磁链幅值|Ψs|
采样速度并进行速度环计算
由
判断出定子磁链所在的扇区号
由
判断出定子磁链所在的幅值范围
恢复现场
中断返回
计算得到电磁转矩Te
图5-9通用定时器T1中断服务程序流程图
在图5-9中,各变量按如下公式[33]计算:
(5-1)
(5-2)
(5-3)
(5-4)
其中,
是a,b相电流,
是直流母线电压,
为开关量(详见第二章§2.1节定义),
为定子电阻,
为极对数。
根据(5-1)计算,
根据(5-2)求出,
按式(5-3)计算(离散化处理),Te按式(5-4)计算。
系统中的各模拟量(如某相电流,转子转速等)经过A/D采样(或光电码盘进行编码)后,转换为相应的数字量,由F240芯片进行处理。
显然实际的模拟值与相应的数字量之间存在着一定的对应关系。
同时,由于F240芯片是定点DSP芯片,为了能够完成小数的运算处理,编程者必须对采样值进行一定的变换以完成小数的运算功能。
关于采样值的变换处理将在下一节中详细讨论。
为了加快控制程序的执行速度,减少控制程序带来的控制滞后,必须快速地判断定子磁链所在的扇区号[20],本文采用如下方法:
由第二章图2-5可知,当
时,定子磁链必在0,1,2号扇区中的某一个,定子磁链的准确位置可由
的正负及
和±0.5|Ψs|(|Ψs|为定子磁链幅值)之间的关系予以确定。
由于判断某个变量是否为负只需判断其最高位是否为1,而判断两个变量之间的大小只需判定它们的差是否为负,因而只需用到减法指令及位判断指令即可快速完成定子磁链所在扇区号的判定。
由于F240指令集中没有开平方指令,因而对定子磁链幅值的判定转化为对幅
值平方的判定(即由判定是否有|Ψs|>Ψgd转换为判定|Ψs|2>Ψgd2,即判定是否有
,其中
为定子磁链幅值给定),显然只需用到F240所提供的平方指令及加减指令即可完成对定子磁链幅值的判定。
有了定子磁链所在的扇区号,幅值判断,再加上转矩的判断,即可确定最优开关矢量。
利用所查得的结果直接对三个全比较寄存器(CMPRx)进行赋值,即可输出6路PWM脉冲,从而实现了对电机的控制。
转矩的给定值是由速度环运算得到的。
本系统利用一个数据单元speed_time进行计数,此数据单元的初始值为8,每120μs其内容减1,当此单元内容为0时进入“速度环计算”模块,完成速度的检测与调节。
常见的数字式速度测量一般有三种方法:
M法,T法和M/T法。
为了简化系统运算,节省运行时间,本系统选用最简单的M法对电机转速进行测量。
具体的方法是:
读取通用定时器T3的计数值,保存于暂存数据单元(temp单元),然后将T3清零。
这时temp单元的内容就是码盘脉冲经F240片内正交解码脉冲单元(QEP)四倍频后的值。
对这个值进行变换,与速度给定值相比较,得到速度误差值,再由PI调节器运算就得到转矩给定值。
5.3.6变量处理方法
1.定点型DSP芯片的特点
自1982年德州仪器公司(TI)推出第一代数字信号处理器-TMS32010以来,DSP芯片的发展经历了定点型,浮点型和多处理器型三个阶段。
TMS320F240芯片的内核为TMS320C2XX型DSP内核,属于定点型DSP芯片。
虽然目前已推出了以C语言为基础的开发软件包,但对于直接使用F240汇编指令集进行编程的开发人员而言,F240这种定点型DSP芯片只支持整数运算。
其内置的32位累加器(ACC)和32位结果存储器(PREG),可直接支持16位整型变量的加、减、乘法运算。
它所提供的“有条件减(SUBC)”指令可使开发者完成16位整型变量之间的除法运算(但要求除数必须是一个正数)。
对于小数之间的运算,例如0.2+0.5或者0.2×0.5,定点型DSP芯片所提供的汇编指令无法完成。
这就需要编程者自己确定某种数据格式,以完成小数之间的运算。
2.4.12格式及变量的标么值表示[42]
对定点型DSP芯片F240而言,一般用一个16位的数据单元去存储某个变量的值,数据单元的最高位(D15)为1表示变量值为负,为0表示变量值为正。
为了表示小数位,编程者可自己确定16位(D0-D15)中有多少位用于表示变量的小数部分,有多少位表示变量的整数部分。
常用的一种方法是用低12位(D0-D11)表示小数部分,高四位(D12-D15)表示整数部分,这种表示方法称之为变量的“4.12格式”表示法。
比如:
十进制小数0.5可表示为0800h,-0.5可表示为F800h;很容易看出,如果设带有小数位的十进制数为X,其4.12格式表示的数为X4.12,则有如下关系:
X4.12=X*4096(X≥0)
及X4.12=65536-|X|*4096(X<0)
另外可以证明:
(X±Y)的4.12格式为X4.12±Y4.12
(X*Y)的4.12格式为X4.12*Y4.12/4096
(X/Y)的4.12格式为(X4.12/Y4.12)*4096
这样,两个小数之间的加、减、乘、除运算转换为其对应的4.12格式整型数之间的运算。
由于4096=212,因而整型数X对4096的乘,除运算实际对应着整型数X的左,右移12位,这使得编程者只需利用F240汇编指令集中所提供的加、减、乘、除及移位指令即可完成小数之间的运算。
由于4.12格式中用高四位代表整数部分,而且最高位被用作符号位,因而限定了-8≤X<8,对于超出此范围的小数X,可以用8.8格式或者其它格式进行表示及处理。
为了方便控制程序的运算和处理,程序中的各变量都用其标么值的4.12格式予以表示。
选定电流基值Ibase=6.6A,电压基值Ubase=311.1V,时间基值Tbase=0.01秒,可相应地确定:
电阻基值Rbase=Ubase/Ibase,磁链基值Ψbase=Ubase*Tbase,电磁转矩基值Tebase=Ψbase*Ibase,这样就可以将各变量用其标么值的4.12格式表示,极大地方便了程序对变量的处理。
3.具体实例
以速度信号的处理为例进行说明:
设Nbase=3000r/min,当电机转子以3000r/min进行转动时,由于每转光电码盘发出2500个脉冲,码盘脉冲经过光电耦合器送入F240相应引脚,在F240片内由正交解码脉冲单元(QEP)进行四倍频,故0.96ms内T3计数器计得的脉冲数为0.96*10-3*3000/60*2500*4=480(个)
此时转速的标么值为1,其4.12格式为4096,由480*Kspeed=4096,可得Kspeed=4096/480=8.533>8
因此必须用8.8格式来表示此比例系数Kspeed,Kspeed的8.8格式为8.533*256=2097.152,表示为16进制数为0888h。
这样,在一个速度环控制周期(0.96ms)内读取的总脉冲数乘以常数Kspeed,并进行移位处理后,就得到了以4.12格式表示的转速浮点数。
§5.4本章小结
本章就TMS320F240芯片为核心控制芯片,IGBT为功率器件构成的DTC系统的硬件结构进行了详细的介绍。
控制电路的调试成功,为后面进一步的研究和实验奠定了基础。
随后介绍了基于磁链U_I模型的DTC系统控制程序的编制,对于程序中用到的中断模块(串口中断、功率驱动保护中断及通用定时器中断)的内容进行了说明,并详细介绍了变量处理方法。
所进行的系统实验表明该控制程序对于变量的处理是完全正确的,并取得了一定的控制效果。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- DTC 系统 软硬件 结构 设计
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《高压旁路系统检修作业指导书》0930.docx
《高压旁路系统检修作业指导书》0930.docx
-
《七律长征》语段阅读及答案2.docx
-
《中国武术史》第一学期教案 2.docx
-
4Photoshop给偏灰的情侣图片增加晨曦效果.docx
-
《复式条形统计图》教学设计6.docx
-
《帕金森病康复中国专家共识》要点.docx
-
《幼儿园教师观摩课发言稿5篇》.docx
-
3分钟述职报告工作范文.docx
-
7年级上册124《生态系统》课堂教学设计.docx
-
16年一建法规试题精选.docx
-
0419已阅十八届五中考试题目.docx
-
Buzpwhj大学英语四级词汇大全.docx
-
demo创建销售订单和mmsc 的bdc 和增加销售订单长文本.docx
-
IE080608统计学课程实验指导书印刷版.docx
-
LearnerBased Teaching in ELT Class以学生为主体的英语课堂教学.docx
-
pep人教版四年级英语上册单元教学设计.docx
-
T梁预制场施工作业安全.docx
-
XX春节座谈会主持词.docx
-
XX新年对联贺词.docx
-
安全管理工作评价管理办法.docx
-
八年级上Unit 8 How was your school trip单元教案.docx
-
爸爸生日的诗意祝福语.docx
-
版幼儿园保育员业务技能考试试题II卷 含答案.docx
-
北京海淀区中考二模语文试题附答案.docx
-
北师大版二年级语文上册绒毛小熊和我们的玩具和游戏教案.docx
-
备考感悟中考文言文阅读分课辑录八年级上册.docx
-
编程实习心得体会.docx
-
部编版道德与法治八年级上册31维护秩序教案教学设计.docx
-
《对社会主义道路的探索》参赛教案.docx
-
《聂绀弩刑事档案》节选.docx
-
《有效沟通技巧》赵永忠章节作业及期末考试.docx
-
3dmax心得体会.docx
-
优字成语优的成语.docx
-
有关经济学的论文.docx
-
枣阳市中考理综适应性考试试题带答案.docx
-
张家口高速路政执法支队度工作总结及工作安排.docx
-
幼儿教师个人学期工作小结与幼儿教师个人年度工作总结汇编doc.docx
-
长尾理论读书报告.docx
-
幼儿园筹备与规划中国国学幼儿园创业计划书.docx
 胸部断面解剖.ppt
胸部断面解剖.ppt
-
浙大材科基模拟题详解.docx
-
浅谈党性与人民性的统一.docx
-
浅析文案三要素背景冲突答案.docx
-
桥梁工程作业指导书.docx
-
青岛版数学五年级下册第七单元长方体和正方体教案.docx
-
情感原创语录.docx
-
求职礼仪手册.docx
-
全国第二届地理奥林匹克竞赛试题1.docx
-
全国数学建模比赛作品.docx
-
全科门诊处方集 全免费下载.docx
-
全中考英语二轮复习同步七年级上检测题含答案.docx
