 A包机器人光机系统文档格式.docx
A包机器人光机系统文档格式.docx
- 文档编号:2967151
- 上传时间:2023-05-01
- 格式:DOCX
- 页数:57
- 大小:40.13KB
A包机器人光机系统文档格式.docx
《A包机器人光机系统文档格式.docx》由会员分享,可在线阅读,更多相关《A包机器人光机系统文档格式.docx(57页珍藏版)》请在冰点文库上搜索。
≥3kg。
含安装底座;
机器人需含安装底座
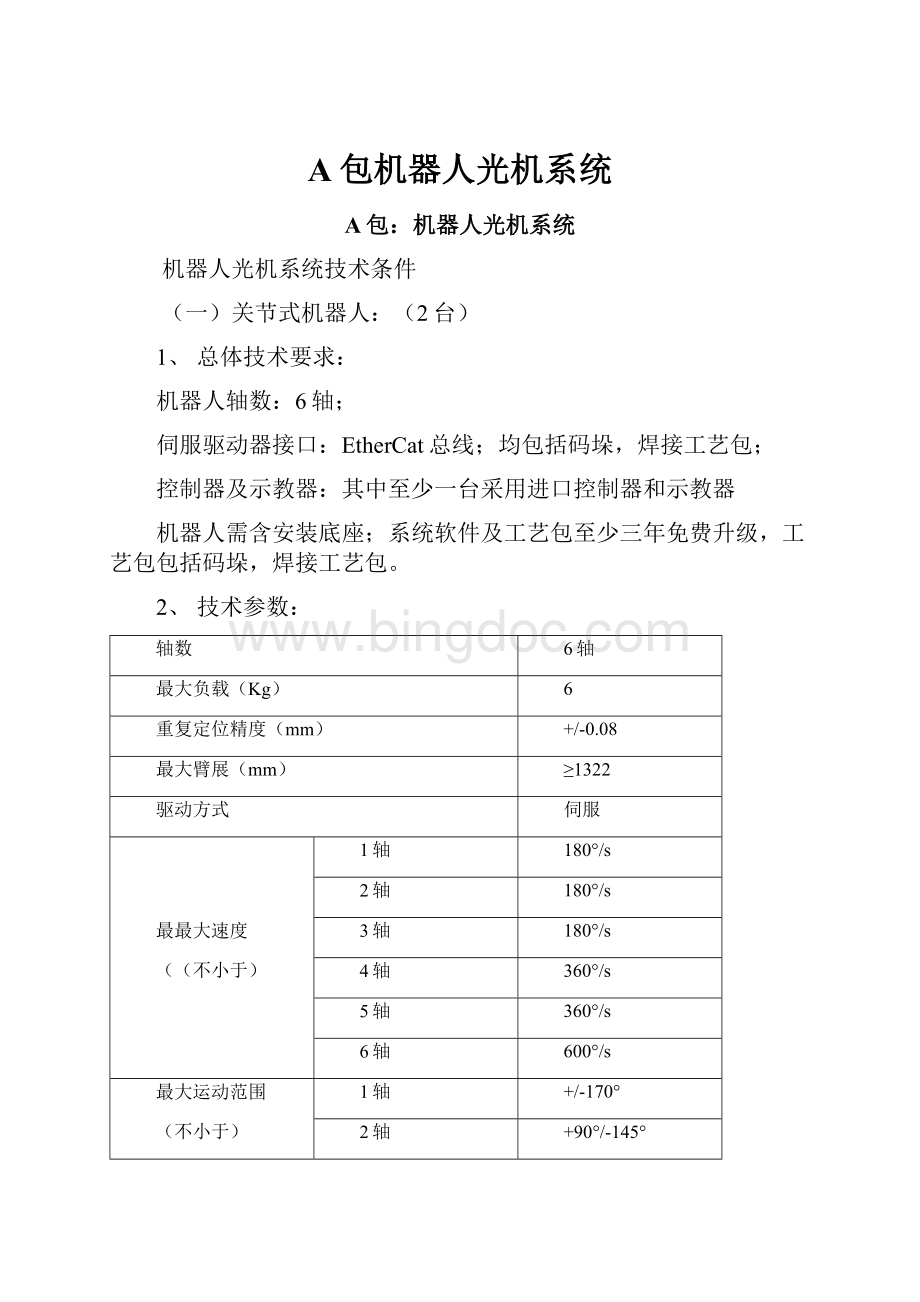
2、技术参数:
≥3
不高于0.02
400
375°
830mm/s
最大运动范围(不小于)
+/-140°
+/-144°
150mm
(三)并联机器人(2台)
安装方式:
支架安装。
2、须配备安装框架和传送带;
提供视觉功能包,功能包包含();
另配备真空吸盘3个,直径分别为10,20,40,配备真空发生器。
3、技术参数:
控制轴数
负载重量(不小于)
1kg
运动范围
J1
直径:
1000mm;
高度:
270mm
J2
J3
J4
720°
最大速度
2次/秒
1、需提供8套桌椅
B包:
双臂机器人工作站
(一)双臂协作机器人平台功能描述
双臂协作机器人是由两个单臂机器人组成的,仅需要一个控制器,即可使双臂动作达到同步协调、运动轨迹灵活的机器人系统。
双臂机器人拥有高弹性的操作空间,更能够有效克服产线上多个单臂机器人容易产生彼此干涉、碰撞的问题。
由于双臂协作机器人能够相辅相成,也可以减少产线上机器人的数量,降低生产成本。
双臂协作机器人尤其适用于3C电子行业的零部件组装。
少量、多样性、客制化的生产已成为当前3C产品生产线的发展趋势。
而双臂协作机器人因独立性高,不需要生产线上独立的工具与之配合,所以在生产线变动的时候,仅需要更换双臂协作机器人手臂末端的夹具即可,具有及其高的灵活性。
(二)采购清单
名称
数量
双臂协作机器人工作站
1套
主题系统
机械臂
2套
机器人一体化驱动单元
4套
底座
控制系统
机器人控制器
2台
机器人控制卡(PC版)
2块
夹取系统
三指灵巧手
2只
两指柔性手爪
感测系统
机器人单目视觉系统
机器人智能视觉平台
软件系统
机器人软件开发包
1个
(三)技术要求
序号
设备名称
主要技术要求
1
双臂协作
机器人本体
(1)机器人本体
⏹两个轻量单臂机器人组成,每臂六个自由度;
⏹采用CAN总线通讯,波特率不低于1Mbps;
⏹单臂工作空间:
≥R800mm;
⏹重复定位精度不低于0.1mm;
⏹单臂负载≥5Kg;
⏹关节转动范围:
≥±
160°
;
⏹支持DI、DO个数≥16、AI个数≥4、AO个数≥2;
⏹防护等级IP54以上;
⏹功耗≤1500W。
(2)机器人一体化驱动单元
⏹采用直流无刷伺服电机;
⏹提供统一的机械接口;
⏹驱动单元平均额定扭矩≥50Nm;
⏹驱动单元转动范围:
120°
⏹驱动单元最大转动速度≥50°
/s;
⏹提供两种以上一体化驱动单元。
(2)机器人底座
⏹能够达到使用稳定的效果;
⏹尺寸(长、宽、高):
≦1000mm,高度可调。
2
⏹通信总线标准:
CAN-Bus、TCP/IP100M、ModbusTCP;
⏹功耗:
≤1000W
⏹IP防护等级:
不低于IP54;
3
⏹采用英特尔第三代i7及以上处理器;
⏹PC接口符合USB2.0(兼容USB1.1)全速协议规范;
⏹集成1路CAN-bus接口,支持CAN2.0A和CAN2.0B协议,符合ISO/DIS11898规范;
⏹CAN-bus通讯波特率不低于1Mbps;
⏹单通道最高接收数据流量:
不低于8000fps(标准帧);
4
⏹负载≥6Kg
⏹质量(包括全部电源和控制)≤1.2Kg
⏹采用直接驱动技术
⏹电码盘精度≥4096
⏹机械手总轴数≥8个
⏹机械手总点击数≥4个
⏹手指本体关节运动范围≥140度
⏹手指末端关节运动范围≥45度
⏹手指可张开角度≥180度
⏹采用钢丝绳传动
⏹控制函数代码开源
⏹采用PUCK控制单元
⏹支持ROS系统
⏹通讯协议:
CAN
5
⏹负载:
≥1Kg;
机器人
单目视觉系统
⏹分辨率:
≥2500像素x2500像素;
⏹像素尺寸:
≤2µ
mx2µ
m;
⏹帧速率:
≥10fps;
⏹视频输出格式:
Mono8,Mono12,Mono12Packed;
⏹数字输入:
至少1路;
⏹数字输出:
⏹通用I/O:
至少2路;
7
智能视觉平台
⏹视觉平台支持分辨率:
≥1280像素×
1024像素;
⏹支持格式:
Mono8、BayerRG8、BayerRG12、BayerRG12Packed、YUV4:
2:
2Packed和YUV4:
2(YUYV);
⏹支持运动目标跟踪、轨迹分析、物体检测、形状识别功能;
8
软件开发包
⏹提供机器人通讯、机器人关节级控制、运动控制和计算机视觉开发包;
⏹机械臂逆运动学求解时间≤2ms;
⏹支持运动控制;
⏹控制精度不低于0.1mm;
⏹支持机器人软件开发包在线更新。
9
电脑
⏹23.0英寸;
⏹CPU型号:
Intel酷睿i74770;
⏹CPU频率:
3.4GHz;
⏹内存容量:
8GB;
⏹硬盘容量:
1TB;
⏹显卡:
NVIDIAGeForceGT640;
⏹光驱:
DVD刻录;
⏹操作系统:
Windows8;
1920×
1080;
⏹鼠标:
惠普光电鼠标;
⏹键盘:
惠普超薄键。
(四)其他要求
1、需提供2套桌椅
C包:
机器人焊接工作站
(一)设备购置
焊接机器人
智能相机及激光焊缝跟踪系统
直线变位机(导轨)
旋转变位机
焊接工装
焊接工件
100
PLC控制系统
焊接系统
清丝系统
隔离防护
(二)技术要求
焊接机器人光机系统技术条件
实施一套机器人弧焊工作站。
该工作站配置如下:
(1)国产弧焊机器人,开放相应的通信接口,便于用户进行二次开发和功能扩展;
(2)智能相机及激光焊缝跟踪系统进口,实时跟踪焊缝位置;
(3)直线变位机(导轨);
(4)旋转变位机;
(5)焊接电源、清丝系统;
(6)焊房结构:
型材框架,防弧光有机玻璃墙面;
(7)焊房排风方式:
墙体侧面开孔,安装风机直排;
(8)需设置PLC系统控制的典型工作站。
工作站焊接演示用的工件由投标方提供,数量不少于100套,并且提供相应的工件图纸。
2、机器人技术参数:
功能
弧焊、上下料
自由度
臂展
≥1000mm
负载
≥5kg
重复定位精度
≤±
0.1mm
最大动作范围
160°
90°
85°
+148°
/-173°
J5
100°
J6
运动速度
≥200°
≥180°
≥400°
≥500°
大于等于600°
电源类型
脉冲MIG焊接电源,支持数字通信接口,额定电流≥350A,
防护等级
IP65或以上
D包:
手术及康复辅助医疗机器人研发服务系统
(一)手术及康复辅助医疗机器人研发服务系统功能描述
经过一段时间的用户和市场调查,以及专家咨询,医疗机器人研发服务平台的功能定位为:
为医疗机器人研发单位提供研发所需的基础软硬件和技术支持。
平台一期建设着重于搭建“基于三维术前设计与动态跟踪、视觉导航的手术机器人”研发和实验平台。
该方向是目前最热门且主流的研究方向,有良好的发展和应用前景。
基于三维术前设计与动态跟踪、导航技术的手术机器人系统构成大致可以分为以下几部分:
三维手术设计软件、术中运动跟踪设备、视觉导航设备、六自由度的机械臂及力感知系统。
系统功能描述:
通过三维手术设计软件处理病人临床采集到的多源原始数据,模拟出手术方案,用以规划机器人的运动轨迹;
通过安装在手术室的动态跟中设备,将手术室坐标系与三维模拟手术方案的坐标系,以及导航设备的坐标系关联统一;
通过导航设备实时调整和纠正机器人术中的真实运动轨迹,通过力感知系统探测机器人与治疗对象的作用,力关系实现术中保护策略的研究。
(二)购置清单
三维手术设计软件
术中运动跟踪设备
视觉控制导航设备
六自由度机械臂
运动控制器系统
六维力力矩传感器系统
产品1
产品2
产品3
试验用手术床及配件
技术要求
备注
三维手术
设计软件
1.能够提供多平面重建及表面重建
2.能够提供多layout观察方式
3.能够提供二维/三维角度,距离测量
4.能够兼容多种CT数据
5.能够提供CT数据坐标转换以及构建三维镜像模型功能
6.能够提供多种手术刀模拟,如:
平面板,折线板等
7.能够提供配准,模拟切割,移动功能
8.能够提供模拟手术前后,量化值比较
9.能够运行环境:
支持windows7以上系统
10.能够提供功能拓展接口
术中运动
跟踪设备
1.能够提供系统坐标系信息以及跟踪目标坐标的原始数据
2.捕捉范围≥1㎡
3.捕捉精度≥0.5mm
4.拍摄速率≥200帧/s
5.数据延迟≤1s,能够实时跟踪预览,读取捕捉数据
6.能够同时跟踪多个目标,支持2D灰度场景视角和捕捉视角的自由切换
7.能够实时监控摄像机的工作状况,实时反馈安装、标定以及捕捉环境
8.支持数据编辑,支持二次开发
9.方便安装和拆卸,可灵活移动
视觉控制
导航设备
一、独立式视线交互设备及分析软件
1、可准确采集人眼在屏幕或场景中的视线位置和轨迹
2、准确度:
≤0.4°
(需提供测试报告)
3、精确度:
≤0.2°
(需提供测试报告)
4、采样率:
≥60Hz
5、眨眼补偿时间:
立刻补偿
6、呈现设备:
可连接笔记本、显示器或安装在实际测试物体上,支持多种尺寸以及VGA、DVI,HDMI等多种接口的显示设备
7、接口:
支持以太网网络接口
8、最大注视角度:
≥30°
9、操作距离:
≥40cm
10、可提供热点图、注视轨迹图、集簇分析、蜂群图、兴趣区和基于兴趣区的眼动指标统计
11、支持动态兴趣区分析,即在动态场景中创建兴趣区
12、实验设计、数据采集、数据分析功能在同一软件界面,提供原厂正式授权软件,软件可以安装在任何计算机上使用,并支持用户定制的二次开发
二、眼镜式视线交互设备及控制和分析软件
1、头戴部分重量≤45g
2、精度:
≤0.5°
3、采样率:
≥50Hz
4、采集方式:
双眼采集,暗瞳追踪
5、场景摄像机分辨率
:
≥1920X1080@25fps高清
6、场景摄像机视野范围:
≥90度,
7、眼动摄像机数量:
≥4个
8、摄像头采集眼睛视觉范围:
水平≥160度,垂直≥70度
9、实时数据传输
10、支持实时查看数据并对测试进行控制
11、支持热点图、注视轨迹回放
12、支持视频数据回放和输出
13、支持视线交互数据手动映射分析
六自由度
1.机器人本体1台
▪六关节型机械臂,提供结构的DH参数。
★1、可作为无菌设备使用于医疗环境且具有第三方权威机构出具的VHP耐受性试验报告;
★2、符合欧盟GMP:
A级标准,ISO14664-1标准Class4(FS209Eclass10),▪负载能力:
≥3kg
▪最大行程:
大于等于650mm
▪重复定位精度:
不低于+/-0.02mm
▪手臂自重:
≤60KG
▪防护等级:
不低于IP65(手腕IP67)
▪环境适应性:
温度:
10-40º
2.机器人控制器1个
▪适用于所提供的机器人手臂控制。
▪控制器有嵌入用户程序的开放性,有支持用户程序开发的编程软件,
▪控制器可通过实时以太网总线通讯或BIO通讯
▪控制器防护等级不低于IP20,环境温度:
10-40°
C
3.外部控制器开发软件1个
▪提供外部控制器开发软件,内置机器人控制算法,支持用户在PC上编写机器人控制算法,通过机器人控制器的实时以太网总线控制机器人的关节联动运动和I/O接口;
▪可获取机器人关节位置信息;
▪具备从系统底层来建立机器人运动学控制应用程序的软件能力
4.手持示教控制盒1个
▪可以启动或结束程序;
▪有在线帮助,纠错提示
▪完整的字母数字键盘
▪与控制器间连接电缆长度不小于7m
▪重量小于750g
▪防护等级不低于IP54
一套
运动控制
器系统
1、主要技术参数:
1)2.2GHz双核IntelCeleron1020E处理器
2)标准配置:
2GB1333MHzDDR3LRAM,最大8GB
3)250GB(或更大)5400RPM硬盘
4)1个千兆以太网端口、4个高速USB端口、串口和其他I/O
5)已安装WindowsOS和驱动;
包含基于硬盘的修复5)1个千兆以太网端口,4个高速USB端口,串口和其他I/O
6)已安装WindowsOS和驱动;
基于硬盘的修复
7)操作温度范围扩展到0-55°
8)可兼容3UPXI和CompactPCI模块
9)可拆卸的高性能交流电源
10)风扇有AUTO和HIGH两档,优化了冷却和噪声性能
11)6轴步进或伺服电机控制
12)64条数字I/O线
13)高速4MHz位置触发
14)内置数据采集,8条16位模拟输入线17)16位,≥250kS/s采样率,80路模拟输入通道
15)24路数字I/O;
2个32位计数器;
数字触发
16)关联(Correlated)DIO(8条时钟线,1MHz)
17)NIST校准认证书以及70多个信号调理选项
18)2路16位模拟输出(更新速率≥830kS/s)
19)完全集成的图形化提供设计软件
20)支持各种测量硬件、I/O和总线
21)用于测量和控制的事件驱动型自定义用户界面
22)具有信号处理、分析和数学运算功能
23)支持高级编译器,确保高性能执行和代码优化
24)支持代码质量审核、单元测试和可执行程序创建
25)使用图形化开发工具,设计自定义运动控制应用程序
26)具有面向轨道生成、样条插值、位置或速度控制的功能
27)具有简化运动轨迹(motionprofile)开发的功能模块(API)
29)支持第三方机械模型,创建虚拟原型
2、主要性能配置:
1)能实现步进/伺服电机运动控制
2)能实现运动轨迹规划、轨迹生成及闭环控制
3)与第三方机械模型结合实现虚拟原型设计
4)对模拟量、数字量进行采集
5)可扩展其他模块化仪器
六维力力
矩传感器系统
产品1技术要求:
1.六维力力矩传感器
2.能够测量6个方向的(Fx,Fy,Mx,My,Mz)的力及弯矩(Fx,Fy,Fz,Mx,My,Mz)的平均值和脉动值。
3.量程:
Fxy:
介于12N至50N之间,Fz:
介于17N至70N之间,Mxyz:
介于0.12N.m至0.5Nm之间
4.分辨率:
不低于Fxy:
1/80N,Fz:
1/80N,Mxy:
1/16Nm,Mz:
1/16Nm。
5.共振频率:
不小于7200Hz
6.可用于A/D板卡采集模式
7.外形尺寸:
直径小于等于17mm,厚度小于等于14.5mm
8.重量:
小于等于9.1g。
9.产品原理:
半导体硅应变原理
产品2技术要求:
2.能够测量6个方向的(Fx,Fy,Mx,My,Mz)的力及弯矩(Fx,Fy,Fz,Mx,My,Mz)的平均值和脉动值。
介于125N至250N之间,Fz:
介于500N至1000N之间,Mxyz:
介于3N.m至6Nm之间
1/24N,Fz:
1/8N,Mxy:
1/660Nm,Mz:
1/1320Nm。
不小于3600Hz
直径小于等于25mm,厚度小于等于21.6mm
小于等于63g。
9.产品原理:
产品3技术要求:
介于145N至580N之间,Fz:
介于290N至1160N之间,Mxyz:
介于5N.m至20Nm之间
4.分辨率:
1/4N,Fz:
1/4N,Mxy:
1/188Nm,Mz:
1/376Nm。
不小于5400Hz
直径小于等于45mm,厚度小于等于15.7mm
小于等于92g。
9.要求有通孔结构,通孔直径不小于9.5mm
10.产品原理:
试验用手
术床及配件
1.电动手术台一个
▪长度≥2mm,宽度≥0.45m
▪可支撑重量≥100kg
▪台面可升降、前后左右倾斜
▪具有手持式操纵器,
▪可灵活安装和拆卸
2.手术用无影灯一套
▪能够提供了冷光,无影,高演色性的手术照明
▪可适用于一般天花板,方便安装
▪能够提供录像功能
▪能够提供售后服务
1.需提供2套桌椅
E包:
高端数控装备研发平台
高端数控装备研发平台包含单直线轴全闭环伺服控制试验平台1、单直线轴全闭环伺服控制试验平台2、单旋转轴全闭环伺服控制试验平台1、单旋转轴全闭环伺服控制试验平台2、四轴运动控制试验平台、多轴自动切割/焊接研发平台、六轴相贯曲线数控切割/焊接数控平台、视觉伺服系统试验平台八个平台组成,具体的要求如下:
(一)单轴全闭环伺服控制试验平台1:
单直线轴全闭环伺服控制试验平台1技术要求:
(1)名称:
单直线轴全闭环伺服控制试验平台
(2)数量:
(3)总体方案和功能描述:
本平台由伺服电机通过滚珠丝杠驱动工作台,可用于半闭环和全闭环方式下的高精度直线进给运动控制方案验证和性能实验;
半闭环方式下,光栅反馈可用于实现位置、速度数显功能;
可用于电子凸轮功能的验证与实验。
(4)系统清单:
A:
平台本体;
B:
伺服电机及驱动器;
C:
全闭环反馈增量式光栅。
(5)技术参数和要求
A:
伺服驱动器:
具有力矩、速度、位置控制方式;
模拟量接口+正交脉冲接口;
带第二反馈接口,可接收TTL、1vpp、旋转变压器和Endat2.0等一种及以上常用反馈信号类型。
增量式光栅全闭环反馈,TTL接口,光栅分辨率:
≤0.001mm;
重复定位精度≤0.02mm;
D:
行程:
≥800mm;
速度≥100mm/s;
E:
带正负限位开关;
F:
平台负载能力:
≥2kg;
(6)其他要求:
(承重、质保、培训、附件等)
配套位置控制方式、速度控制方式接口模块;
免费为使用单位至少3名操作人员进行培训;
C:
需提供6套桌椅;
D:
6台电脑,技术参数为I7,内存8G,硬盘≥1G,独立显卡,23LED,DVD刻录光驱。
(二)单直线轴全闭环伺服控制试验平台2技术要求:
全闭环反馈增量式光栅;
EtherCat总线接口(+模拟量接口+正交脉冲接口);
带第二反馈接口,可接收TTL、1vpp、旋转变压器和Endat2.0等一


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机器人 系统
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
整编新型生态农业旅游休闲农庄项目发展建设市场研究报告.docx
-
证券投资顾问业务暂行规定.docx
-
知识产权法司法考试历年真题及答案解析.docx
-
职业道德的复习重点.docx
-
志愿者活动心得精选多篇.docx
-
治理雾霾应重视大气静电学说.docx
-
中国成人脑死亡判定标准与操作规范第二版.docx
-
中国名牌产品申请表.docx
-
中国纸板产业深度调研及产业投资评估报告.docx
-
中考化学考点分类解析导学案14第3讲碳和碳的氧化物1碳单质的物理性质和用途.docx
-
中学学年度第二学期学校工作计划.docx
-
中英文安全标语word版本 26页.docx
-
重庆市高考英语试题.docx
-
注册安全工程师《安全生产管理知识》真题及答案.docx
-
装机必备硬件基础知识再接再厉完成装机.docx
-
子部.docx
-
总结范文骨干教师培训总结15篇.docx
-
最新 Marlin固件全中文解析.docx
-
最新部编版三年级语文上册第24课《司马光》教学设计.docx
-
最新二年级数学上册寒假作业全面系统146.docx
-
最新猴年祝贺词大全 精品.docx
-
最新入党思想报告3000字范文思想汇报文档五篇.docx
-
《OTL功率放大器的制作与调试》项目教学设计方案.docx
-
《化学方程式》单元检测2.docx
-
中考语文阅读精品题.docx
-
工伤司法鉴定标准是怎样的.docx
-
公共事务管理硕士在职专班入学研究计画书.docx
-
公考必备《行测》数量关系题库.docx
-
股票技术指标详解二.docx
-
人教版数学六下第二单元《百分数二》word教案精品教案.docx
-
简大型机房建设系统全套设计方案.docx
-
建筑工程基础加固与纠偏处理应用探讨.docx
-
祭奠逝去的爱情的说说.docx
-
交通银行内部资料个人信贷业务考试题库.docx
-
教师家访心得体会15篇.docx
-
国旗下学生正能量的讲话演讲稿范文.docx
-
国有资本金效绩评价指标解释1.docx
-
哈烧课程4.docx
-
汉语水平考试HSK四级模拟104.docx
-
行政管理学案例分析汇总.docx
-
行政文员行政助理的工作内容.docx
-
河南省郑州市学年高一下学期期末考试生物试题含答案.docx
-
红薯渣对奶牛产奶量和奶品质的影响.docx
-
湖北省孝感市学年高一下学期期末联考语文试题及答案.docx
-
湖南省醴陵市第二中学学年高二英语月考试题.docx
-
护理教育管理制度.docx
-
护士护理专业理论知识考试试题.docx
-
化学计量在实验中应用知识归纳及巩固.docx
-
环境年度工作计划范文5篇.docx
-
汇报演出.docx
-
会计电算化考试题库及答案.docx
