 自动化仓库的出入库能力分析.pdf
自动化仓库的出入库能力分析.pdf
- 文档编号:3436127
- 上传时间:2023-05-05
- 格式:PDF
- 页数:6
- 大小:419.60KB
自动化仓库的出入库能力分析.pdf
《自动化仓库的出入库能力分析.pdf》由会员分享,可在线阅读,更多相关《自动化仓库的出入库能力分析.pdf(6页珍藏版)》请在冰点文库上搜索。
第29卷第1期2010年2月兰州交通大学学报JournalofLanzhouJiaotongUniversityVol.29No.1Feb.2010文章编号:
100124373(2010)0120038205自动化仓库的出入库能力分析3马永杰1,2,蒋兆远1(1.兰州交通大学机电技术研究所,甘肃兰州730070;2.西北师范大学物理与电子工程学院,甘肃兰州730070)摘要:
利用遗传算法确定了自动化仓库的动态拣选货位,采用多质点重心法获得了堆垛机的动态待命位,在此基础上,利用堆垛机的加速和减速曲线,得到堆垛机在自动化仓库中的平均作业时间,最终获得自动化仓库的出入库能力为121托盘/小时.关键词:
自动化仓库;出入库能力;遗传算法;理想待命位中图分类号:
TG15文献标志码:
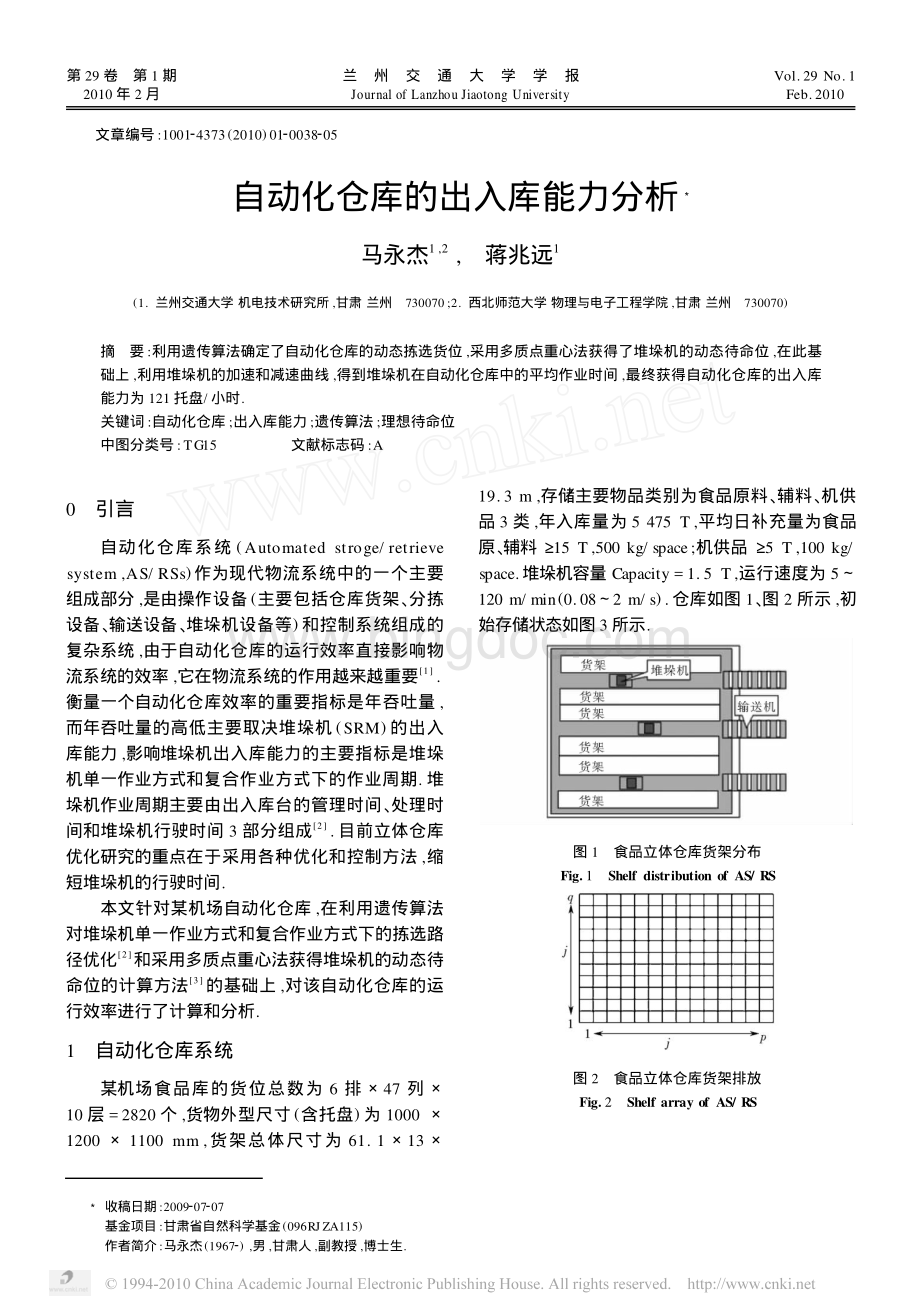
A0引言自动化仓库系统(Automatedstroge/retrievesystem,AS/RSs)作为现代物流系统中的一个主要组成部分,是由操作设备(主要包括仓库货架、分拣设备、输送设备、堆垛机设备等)和控制系统组成的复杂系统,由于自动化仓库的运行效率直接影响物流系统的效率,它在物流系统的作用越来越重要1.衡量一个自动化仓库效率的重要指标是年吞吐量,而年吞吐量的高低主要取决堆垛机(SRM)的出入库能力,影响堆垛机出入库能力的主要指标是堆垛机单一作业方式和复合作业方式下的作业周期.堆垛机作业周期主要由出入库台的管理时间、处理时间和堆垛机行驶时间3部分组成2.目前立体仓库优化研究的重点在于采用各种优化和控制方法,缩短堆垛机的行驶时间.本文针对某机场自动化仓库,在利用遗传算法对堆垛机单一作业方式和复合作业方式下的拣选路径优化2和采用多质点重心法获得堆垛机的动态待命位的计算方法3的基础上,对该自动化仓库的运行效率进行了计算和分析.1自动化仓库系统某机场食品库的货位总数为6排47列10层=2820个,货物外型尺寸(含托盘)为100012001100mm,货架总体尺寸为61.11319.3m,存储主要物品类别为食品原料、辅料、机供品3类,年入库量为5475T,平均日补充量为食品原、辅料15T,500kg/space;机供品5T,100kg/space.堆垛机容量Capacity=1.5T,运行速度为5120m/min(0.082m/s).仓库如图1、图2所示,初始存储状态如图3所示.图1食品立体仓库货架分布Fig.1ShelfdistributionofAS/RS图2食品立体仓库货架排放Fig.2ShelfarrayofAS/RS3收稿日期:
2009207207基金项目:
甘肃省自然科学基金(096RJZA115)作者简介:
马永杰(19672),男,甘肃人,副教授,博士生.第1期马永杰等:
自动化仓库的出入库能力分析图3食品立体仓库初始库存状态Fig.3InitialvalueoffoodAS/RS2堆垛机拣选路径的优化如果采用随机存储策略,则自动化立体仓库的优化目标包括:
1)库区分配优化:
库区分配优化的目的是使处于第i列j层立方体索引号Ik较小的货品尽可能地存放在距离巷道口最近的货位.minQ=pi=1qj=1Ikij
(1)2)货位分配优化:
货位分配优化的目的是使货物质量wij较小的货品尽可能地存放在货架的高处.minS=pi=1qj=1j/wij
(2)但取货时则应尽可能地从高处取货,以保持货架的稳定.maxS=pi=1qj=1jwij(3)3)行驶时间优化:
行驶时间优化的目的是采取某种路由和拣选次序策略,使堆垛机尽可能地以较小的行驶时间完成货位上的货物的入库(storage)和出库(retrieve)操作.如果忽略堆垛机的启动、制动时间和货叉的伸缩以及货物的搬运时间,并且假定货位之间的距离能够使堆垛机以最大水平速度vx、最大垂直速度vy运行,则行驶时间优化可以表述为minT=pi=1qj=1tij=pi=1qj=1maxL(i-1)vx,H(j-1)vy(4)自动化仓库优化问题应该满足的约束条件如下:
1)堆垛机容量Capacity是有限的,即在一次作业周期中,堆垛机能够承载的货物重量W应该满足W=mk=1nkl=1wklCapacity(5)其中:
k是货物种类的下标;l是每种种类中货品的下标;nk是第k类中货物的数量;wkl是第k类中第l个货物的重量.2)在多任务作业周期中,应该采取先存后取的策略.货物在任意两点(i1,j1)、(i2,j2)进行存储作业时,存储次序应该满足i增大策略(由近及远)4,即i1i2,j1j2(6)货物在任意两点(i3,j3)、(i4,j4)进行出库作业时,出库次序应该满足i减小策略(由远及近)i3i4,j3j4(7)3)在存储货物时,要保证货位为空,即v(i,j)=0(8)在取货时,要保证该货位为准备出库的货物如图3所示.v(i,j)=X,XA,B,C(9)对上述约束多目标问题,采用Pareto遗传算法求解,结果如表1所示.表1采用约束遗传算法求解的Pareto最优解集Tab.1ParetosolutionsusingCMOGA任务目标函数Pareto最优解集(i,j)=货物任务目标函数Pareto最优解集(i,j)=货物单任务SCC双任务DCC+A-B+C-A
(2);(3);(5)
(2);(4);(5)
(2);(3);(4);(5)(3,1)=0;(4,1)=0(2,1)=B;(2,2)=B(3,1)=0;(4,1)=0(1,2)=A;(6,1)=A四任务QCC+A+B-C-C
(2);(3);(4);(5)(3,1)=0;(4,1)=0(3,5)=0(2,3)=C(1,1)=C;(2,3)=C注:
1.+表示存储,-表示出库.2.四任务命令周期中,+B是以(3,1)作为(i2,j2),-C时是以(2,3)作为(i3,j3).3堆垛机的动态理想待命位理想待命位(OptimalDwellPoint,ODP)实际上是为了快速服务n个客户而需要的一个理想的中心位置(distribu2tioncenter,DC).假设(p,q)表示动态待命位的坐标,(pi,qi)为每个客户的位置,ci93兰州交通大学学报第29卷为单位时间内服务第i(i=1,n)个客户的次数,则动态待命位问题(DwellPointProblem,DPP)是要保证从(p,q)到达客户的时间最短,即minOBJ=ni=1|pi-p|ci+ni=1|qi-q|ci(10)堆垛机的动态待命位问题,就是寻找满足式(10)的堆垛机停靠点D(p,q).在单任务命令周期中,堆垛机动态待命位将对整个任务的执行造成影响,在多任务命令周期中,堆垛机动态待命位仅仅对第一个任务的执行周期产生影响.如果采用随机存储策略,在单命令周期,单入口、单出口(多出口的配置对于结果不会产生影响)情况下,若下一条任务为出库操作,且未指定货物,若需存取流通率最高、存储时间最长的货物,堆垛机的停靠位置要保证任务启动后到达P(pij,qij)的时间最短.假定:
1)如果立体仓库中有多个巷道,每个巷道只有一个堆垛机,每个堆垛机只服务于一个巷道,每个堆垛机都是各自独立地工作.2)货区的长、高、堆垛机水平运行和垂直升降的速度均为已知.堆垛机的工作速度为水平运行与垂直升降两个速度的合成值.堆垛机在水平方向和垂直方向同时启动,并分别按最大水平行驶速度vx和垂直升降速度vy运行,在计算运行时间时,忽略堆垛机的加速和减速时间,并取两个结果中较大者t=max(pij/vx,qij/vy).3)在以水平运行时间和垂直运行时间为两坐标轴的坐标系中,货区被近似为一个连续的矩形框,出、入库口都位于仓库的左下角(0,0).4)堆垛机可在单命令或多命令运行方式下工作.5)货物在仓库中是随机存储的,每一类货物的Ii、kij和存储位置都是已知的,并且随着存取操作,它们也是动态变化的.6)在出库操作中,当同一类货物有多个货品具有相同的存储时间时,按照就近出库的原则选择距离出库口最近的货品.由此可见,堆垛机的动态待命位仅仅影响当下一条任务为出库操作时的效率.如果为入库操作,假定堆垛机待命于入库口(0,0),则对入库效率没有影响,此时对于本次任务为入库操作预测的准确性将对结果产生重大影响.如果为出库操作,堆垛机的动态待命位到第一个存储点的距离将会对第一个任务的执行产生影响,同时,对于本次任务为出库操作预测的准确性也对结果产生重大影响.在出库操作中,堆垛机访问的第一个存储点应该是位于流通率最高、存储时间最长的货物所在的位置.对于m类货物,每类货物的流通率为Ii,每类货物中li个货品的存储时间为kij|i=1,m,j=1,li,则第i类货物中存储时间最长货品的存储时间为ki=supkij|i=1,m,j=1,li(11)所以,由假设(6)知,至少存在着m可能访问点.这m个可能访问点Pi|i=1,m形成一个多边形,如果让堆垛机停靠在该多边形的几何中心D,那么就可以获得较小的运行时间,如图4所示.图4动态停车位的选择Fig.4SelctionofDPP采用多质点重心法,可以得到堆垛机的动态待命位为D(p,q)=(mi=1piIi/mi=1Ii,mi=1qiIi/mi=1Ii).(12)随机生成下一条任务为入库作业的概率,以100次为一组,利用多质点重心法计算的结果如表2中平均时间1.如果对于货物的存储时间没有严格的要求(即并不要求存储时间最长的货物率先出库),可以采用取supIikij|i=1,m,j=1,li方法来计算,并且可以获得更好结果如表2中平均时间2.4自动化仓库的出入库能力的分析该机场立体库的L=1300mm,H=1300mm,堆垛机容量Capacity=1.5T,整机水平运行速度v1为5120m/min,水平运行加速度au为0.350.5m/s2,载货台升降速度为030m/min(无级变速),提升加速度为0.350.5m/s2,微升降速度vv为04第1期马永杰等:
自动化仓库的出入库能力分析4m/min,货叉伸缩运行速度vc为036m/min(无级变速),ac为0.350.5m/s2,货叉最大行程s为1.30m.表2从动态停车位到第一个出库点需要的平均时间(s)Tab.2AveragetimefromDPPtofirstretrievalpoint组次12345678910平均平均时间12.05091.77200.76870.93102.76920.53902.85021.84422.46883.24761.92416平均时间20.80002.27732.66670.38891.63851.27362.30560.82862.05262.42071.66525所有参数均取最大值进行计算.1)堆垛机在水平方向爬升到最大速度后,立即减速停靠需要走过的距离如图5所示的堆垛机加速和减速曲线中,爬升到最大速度所需时间为图5堆垛机加速减速曲线Fig.5SRMspeedcurvet1=v1/au=4s从最大速度减速到中速所需时间为t2=(v1-v2)/au=2.67s(v2=40m/min)中速运行时间为t3=sz/v2=2.175s式中:
sz为堆垛起重机中速运行距离,sz=1.45m从中速到停稳所需时间为t4=v2/au=1.333s则所需要的总时间为t=t1+t2+t3+t4=10.178s加速和减速时间内堆垛机运行距离为su=aut21/2+aut22/2+sz+aut24/2=7.68m若从待命位到货位位置的水平距离小于7.68m,则堆垛机不能以最大速度运行,此时堆垛机将加速到某一速度后必须立即减速停靠,如图6所示,走过距离s所需的时间为t=2(s-1.45)/au+1.33(13)2)货叉伸叉(缩叉)时间货叉加速到最大速度所需时间为t1=t2=vc/ac=1.2s货叉所移动的距离为s1=s2=ac21/2=0.36m图6堆垛机以较低速度运行Fig.6SRMworkwithlowspeed图7货叉伸叉(缩叉)曲线Fig.7Goodsforkspeedcurve货叉完成一次存储所需时间为tc=(s-s1-s2)/vc+t1+t2=3.37s3)载货台微升降时间tv=sv/vv=1.35s式中:
sv为载货台微升降高度,sv=0.09m4)单任务入库作业周期在单任务入库作业周期,堆垛机的动态待命位对入库作业没有影响,此时的作业时间主要取决于采用遗传算法获得的存储货位.假如当前任务是存储A,按照表1中的计算结果,取(3,1)作为存储货位,由于此时,堆垛机行程=(3-1)L=2.67.67m,则堆垛机只能以低速运行.其作业周期为E(T(SC)=T1+T2+ts+2tv+4tc其中:
T1为堆垛机负载从入库口到货位(3,1)所需的时间.由式(13)可得T1=4.363s;T2为堆垛机空载从货位(3,1)回到入库口所需的时间,T2=T1=4.363s;ts为单一作业时总延时时间,取ts=8s.因此,E(T(SC)=T1+T2+ts+2tv+4tc=32.724s如果预测的下一个作业周期为出库作业,则堆14兰州交通大学学报第29卷垛机会停靠在动态待命位,而不必回到出库口,所需的时间小于T2.5)单任务出库作业周期在出库作业,对于出库作业的预测和动态待命位对出库作业的作业周期都会产生影响.假如当前任务是取出B,按照表1中的计算结果,取(2,1)作为出库货位,由于此时堆垛机行程为(2-1)L=1.37.67m,则堆垛机只能以低速运行,可知其作业周期为E(T(SC)=T3+T4+ts+2tv+4tc其中:
T3为堆垛机空载从动态待命位到货位(2,1)所需的时间.利用文献2的计算结果,此时堆垛机的动态待命位到货位的时间取表2中的平均值,可得T3=1.924s;T4为堆垛机负载从货位(2,1)回到入库口所需的时间,由式(13)可得T4=1.33s.因此,E(T(SC)=T3+T4+ts+2tv+4tc=27.434s.6)双任务作业周期在双任务周期,由于要遵从先存后取的约束,所以堆垛机处于入库口的位置.假如当前任务是存储C,取出A,按照表1中的计算结果,取(3,1)作为入库货位,(6,1)作为出库货位,其作业周期为E(T(DC)=T5+T6+T7+ts+4tv+8tc其中:
T5为堆垛机负载从入库口到货位(3,1)所需的时间,由式(13)可得T5=4.363s;T6为堆垛机空载从入库货位(3,1)到出库货位(6,1)所需的时间,T6=4.363s;T7为堆垛机负载从货位(6,1)回到入库口所需的时间,由式(13)可得T7=5.827s;ts为复合作业时总延时时间,取ts=12s.因此,E(T(SC)=T5+T6+T7+ts+4tv+8tc=58.913s7)自动化仓库的出入库能力将上述3种情况取平均值,可得该自动化仓库完成一次出入库任务所需时间为E(T)=29.768s则其出入库能力为3600/29.768=121tray/h每托盘1.5T,出入库能力为121tray/h315T/tray=181.5T/h5结果讨论本文是基于随机存储策略进行自动化仓库货位的动态分配和堆垛机动态待命位的选择,所以得到的出入库能力为121tray/h,文献627给出的结果,该指标达到较高的水平.如果采用其它的货位分配策略8、作业调度原则9和多堆垛机的任务调度,如果再考虑同类货物按照存储时间来选择出库的优先级,货物拣选在整个LH区域内(而不是仅仅在左下角)完成,则在保持堆垛机性能指标不变的前提下,堆垛机完成一次作业必定需要更长的作业周期,出入库能力必定低于本文计算的结果.所以本文实际上是在采用智能控制方法对自动化仓库进行控制后,该自动化仓库所能达到的最大出入库能力,该指标可以作为自动化仓库设计和运行中的一个重要参考指标.文献223利用遗传算法等智能控制方法对于自动化仓库中的货位分配、拣选路径优化、堆垛机动态待命位的确定进行优化控制,由本文计算可知,采用上述智能控制方法对于提高自动化仓库的出入库能力具有较大的贡献.参考文献:
1祁庆民,侯凌燕,王欣旭,等.中国制造企业物流现状和发展方向研究J.起重运输机械,2003(11):
629.2马永杰,蒋兆远,杨志民.基于遗传算法的自动化仓库的动态货位分配J.西南交通大学学报,2008,43(3):
4152421.3马永杰,蒋兆远.立体仓库中堆垛机的动态待命位的控制J.起重运输机械,2008(8):
42246.4PotrcI,LerherT,KrambergerJ,etal.Simulationmod2elofmulti2shuttleautomatedstorageandretrievalsys2temsJ.JournalofMaterialsProcessingTechnology,2004,1572158:
2362244.5秦叙斌.有轨巷道堆垛起重机入出库能力的计算J.起重运输机械,2001
(1):
9211.6张晨阳.小型多功能自动化立体仓库设计J.湖北汽车工业学院学报,2003,17(3):
12215.7褚方鸿.从东京物流展看物流技术的发展趋势J.物流技术与应用,2005(11):
34237.8柳赛男,柯映林,李江雄,等.基于调度策略的自动化仓库系统优化问题研究J.计算机集成制造系统,2006,12(9):
143821443.9徐香玲,傅卫平,李德信,等.基于专家系统的自动化立体仓库出入库调度研究J.物流技术,2005
(2):
38240.(下转第47页)24第1期孙金龙等:
具有输入滞后的不确定系统时滞依赖鲁棒H可靠控制棒H控制J.清华大学学报:
自然科学版,2003,43(7):
9122915.8俞立.鲁棒控制M.北京:
清华大学出版社,2002.RobustHReliableControlforUncertainSystemswithInputDelaySUNJin2long1,LINing2,TEGNQing2fang1(1.SchoolofAutomation&ElectricalEngineering,LanzhouJiaotongUniversity,Lanzhou730070,China;2.SchoolofElectronicandInformation,XianTechnologicalUniversity,Xian710032,China)Abstract:
TherobustHreliablecontrolwithstabilizationisinvestigatedforinputtime2varyingdelayeduncertainsystemsagainsttheactuatorfailure.Astate2spacemodelcontainingparameteruncertain,inputtime2varyingdelay,actuatorfailure,etc.isestablished.ArobustHreliablecontrolalgorithmisalsopro2posedbasedonbothstatefeedbackandLMIapproaches.ThecontrollerisderivedforasufficientconditiongivenbytheLMI.Finally,thesimulationresultsshowthattheproposedmethodisfeasible.Keywords:
Hreliablecontrol;inputtime2varyingdelay;delaydependent;actuatorfailure;LMI(上接第42页)AnalysisoftheStorageCapacityinAnAutomatedStorage/RetrievalSystemMAYong2jie1,2,JIANGZhao2yuan1(1.MechatronicTechnologyInstitute,LanzhouJiaotongUniversity,Lanzhou730070,China;2.SchoolofPhysicsandElectronicEngineering,NorthwestNormalUniversity,Lanzhou730070,China)Abstract:
ThedynamicpickingpathoptimizationisdeterminedbyusingtheGeneticAlgorithmonAS/RSswhichhavethegoodsstoredinside.TheoptimaldwellpointofSRMisobtainedbyusingmutli2particlebar2ycentermethods.Basedonaboveprocedures,theaverageoperatingtimeofSRMisgotwithspeedcurve.Thestoragecapacity,whichis121tray/hour,iscalculatedfinally.Keywords:
automatedstorage/retrievalsystem;storagecapacity;GeneticAlgorithm;optimaldwellpoint74


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 自动化 仓库 入库 能力 分析
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 二年级下册数学专项练习-应用题1.docx
二年级下册数学专项练习-应用题1.docx
-
2015年小学六年级英语语法及习题.doc
-
福师2018.8《小学教育管理考核题》答案.doc
-
《西游记》课外阅读汇报课教案.doc
-
初中美术《藏书票》说课稿.doc
-
《乡愁》教学设计与反思.doc
-
17年语文龙岩质检卷(含答案).doc
-
A4作文稿纸模板.doc
-
IBMX5服务器设置流程Word文件下载.docx
-
IE部岗位职责文档格式.doc
-
IPV4向IPV6平滑过渡毕业论文Word下载.doc
-
IP数据包的捕获与分析设计报告Word文档格式.docx
-
IT服务外包及报价文档格式.doc
-
IT项目管理的六种错误思维Word下载.doc
-
IT行业服务话术及处理技巧Word文件下载.docx
-
Java仓库管理系统报告文档格式.doc
-
Java开发中的种设计模式Word格式.doc
-
浙江传媒学院笔试真题.doc
-
欧洲及北美动画史.doc
-
粮食仓储管理制度.doc
-
(完整版)《那个星期天》习题和答案.docx
-
(完整版)机房巡检表.doc
-
小升初数学全真模拟试卷1.doc
-
2022最新教科版五年级下册科学全册教案Word文档下载推荐.docx
-
机械加工件检验标准Word文档格式.docx
-
小升初数学衔接教材北师版学生版.doc
-
初中美术_文明之光——瓷器教学设计学情分析教材分析课后反思Word格式文档下载.docx
-
围堰施工专项施工安全方案文档格式.doc
 中考语文综合探究专题复习用.ppt
中考语文综合探究专题复习用.ppt
-
种植养护实施方案.docx
-
小学数学研究性学习设计方案_四年级数学_数学_小学教育_教育专区.doc
-
综合实践活动《鸟巢创意搭建》教学设计.docx
-
卫生计生监督执法人员单选题讲解.docx
-
液相操作注意事项.docx
-
系统操作安全知识题库.docx
-
一级建造师《建筑工程管理与实务》模拟真题B卷 附答案.docx
-
文化广场施工组织设计方案样本.docx
-
新人教版必修四 Unit 1 Women of achievement单元测试.docx
-
文明社区创建汇报材料模板五篇.docx
-
一轮复习定语从句.docx
-
我不生气了中班教案.docx
-
新十八谈之和谐篇和谐发展谱新篇.docx
-
我的梦想高中作文集合六篇.docx
-
一年级数学课堂小游戏2.docx
-
我国货币供应量对经济增长影响的研究本科毕业设计论文.docx
-
详解财务报表分析思路及舞弊造假逻辑.docx
-
新视野大学英语读写教程第三版第四册课文原文与翻译.docx
-
我所看到的美国小学教育高钢.docx
-
新刑诉法对侦查监督工作的影响与应对.docx
-
我最喜欢的一堂体育课作文.docx
-
新整理毕业论文致谢500字25篇.docx
