 二阶系统的PID校正Word文件下载.docx
二阶系统的PID校正Word文件下载.docx
- 文档编号:4512678
- 上传时间:2023-05-03
- 格式:DOCX
- 页数:10
- 大小:149.06KB
二阶系统的PID校正Word文件下载.docx
《二阶系统的PID校正Word文件下载.docx》由会员分享,可在线阅读,更多相关《二阶系统的PID校正Word文件下载.docx(10页珍藏版)》请在冰点文库上搜索。
2.设计要求及任务
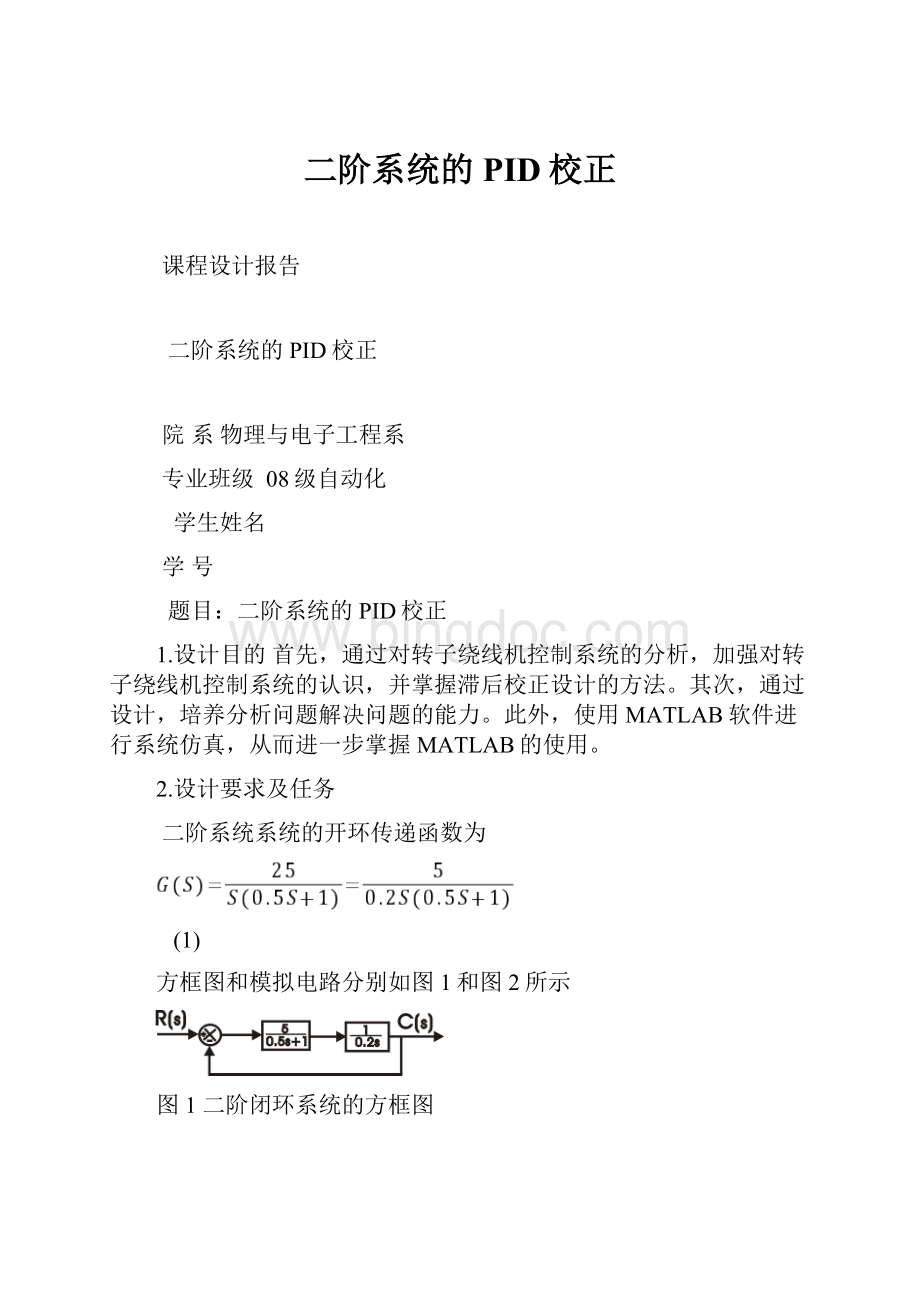
二阶系统系统的开环传递函数为
(1)
方框图和模拟电路分别如图1和图2所示
图1二阶闭环系统的方框图
图2二阶闭环系统的模拟电路图
设计要求:
要求完成的主要任务:
1.研究系统的暂态性能和稳态性能;
2.研究系统的频率特性;
3.研究PID控制器的工作原理;
4.研究系统的PID校正方法;
5.系统的仿真方法;
6.系统的模拟调试。
7.完成设计报告
3.PID校正原理分析
校正常用的性能指标
校正中常用的性能指标包括稳态精度、稳定裕量以及响应速度等。
(1)稳态精度指标:
位置误差系数Kp,速度误差系数Kv和加速度误差系数Ka。
(2)稳定裕量指标:
相角裕量γ,增益裕度Kg,谐振峰值Mr,最大超调量σ,阻尼比。
(3)响应速度指标:
上升时间tr,调整时间ts,剪切频率ωc,带宽BW,谐振频率ωr。
系统的暂态性能和稳态性能
(一)暂态响应(动态响应):
是指系统的输出从输入信号r(t)作用时刻起,到稳定状态为止,随时间变化的过程。
系统的暂态性能通常以系统在初始条件为零的情况下,对单位阶跃输入信号的响应特性来衡量。
1、最大超调量sp——响应曲线偏离稳态值的最大值,常以百分比表示,即
最大超调量说明系统的相对稳定性
2.峰值时间tp——响应曲线到达第一个峰值所需的时间,定义为峰值时间。
3.延滞时间td——响应曲线到达稳态值50%所需的时间,称为延滞时间。
4.上升时间tr——反映动态初期的快慢,有2种定义:
(1)响应曲线从稳态值的10%到90%所需时间;
(2)响应曲线从零开始至第一次到达稳态值所需的时间。
5.调整时间ts——响应曲线从零开始到进入误差允许范围内所需时间。
误差允许范围通常用稳态值的绝对百分数给出,如稳态值的95%~105%(或98%~102%。
(二)稳定性是由系统结构和参数决定的,与外界输入无关。
就是指系统当扰动消失后,若系统能够恢复平衡状态,则称系统是稳定的;
若扰动消失后不能恢复平衡状态,而偏差越来越大.则称系统是不稳定的。
稳态过程(稳态响应),是指当时间t趋近于无穷大时,系统输出状态的表现形式。
它表征系统输出量最终复现输入量的程度,提供系统有关稳态误差的信息,用稳态性能指标来描述。
系统稳态性能指标:
稳态误差。
PID控制器的工作原理
1.比例(P)控制规律
具有比例控制规律的控制器,称为比例(P)控制器,Gc(s)=Kp,称为比例控制器增益。
比例控制器实质上是一个放大器。
在信号变换过程中,比例控制器只改变信号的增益而不影响其相位。
在串联校正中,加大控制器增益Kp,可以提高系统的开环增益,减小系统的稳态误差,从而提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成闭环系统不稳定。
2.微分(D)控制规律
具有微分控制规律的控制器,称为微分(P)控制器,Gc(s)=Kds,其中Kd为可调比例系数.
在微分控制中,控制器的输出与输入误差信号的微分成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。
其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
3.积分(I)控制规律
具有积分控制规律的控制器,称为积分(I)控制器。
Gc(s)=1/(Kis),其中Ki为可调比例系数。
由于积分控制器的积分作用,当输入信号消失后,输出信号有可能是一个不为零的常量。
串联校正时,采用积分控制器可以提高系统的型别(Ⅰ型系统,Ⅱ型系统等),有利于系统稳态性能的提高,但积分控制使系统增加了一个位于原点的开环极点,使信号产生90°
的相角滞后,对系统的稳定性不利。
因此,在控制系统的校正设计中,通常不宜采用单一的积分控制器。
系统的PID校正方法:
校正装置接入系统的形式主要有两种:
(1)校正装置与系统原有部分相串联,这种校正方式称为串联校正;
(2)从系统原有部分引出反馈信号,与原有部分或其一部分构成局部反馈回路,并在局部反馈回路内设置校正装置,这种校正方式称为反馈校正或并联校正,
为提高性能,也常采用串联反馈校正。
反馈控制与前馈控制并用,也称为复合控制系统。
串联校正简单,较易实现。
反馈校正可以改善被反馈包围的环节的特性,抑制这些环节参数波动或非线性因素对系统性能的不良影响。
复合控制则对于既要求稳态误差小,同时又要求暂态响应平稳快速的系统尤为适用。
综上所述,控制系统的校正不会像系统分析那样只有单一答案,也就是说,满足性能指标要求的校正方案不是唯一的。
4.设计方案论证
当控制系统的性能指标不能满足期望的特性指标时,需要在已选定的系统不可变部分的基础上加入一些装置(即校正装置),使系统能满足各项性能指标。
校正前系统分析
根据实验要求连接实验线路图,用模拟示波器仿真实验现象如下图一所示:
图一
由校正前的波形可得
最大超调量σp为
=
=62%
调节时间ts=
用matlab进行仿真可得图二,图三,图四:
图二
图三
图四
选择校正方案
因为超调量σp过大,调整时间ts过长,因此要对其进行校正,根据校正要求,在系统原有部分前加入校正环节,试凑比例环节和微分环节的可调比例系数并仿真得下图波形,符合校正要求。
根据设计要求:
,可知校正装置中不能出现积分环节,有知Kv=K,则比例环节看Kp=1。
因此只需要调节微分环节的可调比例系数就能满足要求。
其中取Kp=1,Kd=
图五
图六
图七
校正仿真出来的波形如右图所示
最大超调量
=
=17%
调整时间ts=
符合要求
,
它的伯德图如下图所示
校正前后的比较
校正前后最大超调量σp明显减小,调节时间ts明显减短,系统因加入校正装置,稳态性能和暂态性能明显得到改善,微分环节的加入使系统克服误差调节过程中可能会出现振荡甚至失稳。
参考文献
[1]胡寿松自动控制原理(第五版)北京:
科学出版社.2007[2]张静.MATLAB在控制系统中的应用.北京:
电子工业出版社.2007


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 系统 PID 校正
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 建筑工程编制依据及概况.docx
建筑工程编制依据及概况.docx
-
建筑工程质量控制点土建类.docx
-
建筑设计师的总结报告最新版.docx
-
建筑制图基础机考网考题库及复习资料.docx
-
健身房经营管理方案之欧阳科创编.docx
-
江苏省计算机二级VB考试真题及参考答案.docx
-
江西省新余市事业单位《职业能力测验》教师教育与答案.docx
-
交通信号灯及路灯施工方案.docx
-
教改课题申报书填写技巧.docx
-
教师读书活动总结4篇.docx
-
教师考核表评语.docx
-
幼儿园园务工作总结.docx
-
幼儿园中班配班个人工作计划范文五篇.docx
-
幼教考试作文写作.docx
-
热门财务述职报告锦集5篇.docx
-
人教 模块一Unit1 学案.docx
-
人教版 九年级上册 新初三暑假衔接课程 圆 第一二课时 含习题和答案教育文档.docx
-
人教版地理初二上学期综合检测卷一含答案.docx
-
人教版高二英语选修7单词表doc.docx
-
商务与经济统计作业仅供参考.docx
-
上半年安徽省安全工程师安全生产法行政处罚的概念试题.docx
-
上半年贵州省安顺市平坝区事业单位《职业能力倾向测验》试题及答案.docx
-
学年高中英语高考提能练Unit1Schoollife仿真检测灵活拆组卷牛津译林版必修1.docx
-
学年家长学校工作总结.docx
-
THE PORTABLE WEBSITE.docx
-
学校教务处工作总结4篇.docx
-
学校组织一次义卖会方案.docx
-
XX规划局大型展览馆改扩建工程项目可行性研究报告.docx
-
验工计价管理办法.docx
-
XX农家乐生态园投资经营项目商业计划书.docx
-
液晶材料市场分析报告.docx
-
XX乡村电子商务服务站项目投资建设运营方案.docx
-
银行警示教育活动心得体会Word文档格式.docx
-
英文美文之阳光下的时光欣赏Word文档格式.docx
-
英语期末考试复习题Word文件下载.docx
-
盈建科各种参数设置Word文档格式.docx
-
应收款项习题及答案Word格式文档下载.docx
-
用人单位职业卫生基础建设文档格式.docx
-
优秀运动员聘用合同协议书范本Word格式文档下载.docx
-
有关青年教师帮扶工作个人心得体会Word文档格式.docx
-
幼儿教师招聘考试18套试题和答案Word下载.docx
-
幼儿园大班工作总结6篇Word格式.docx
-
幼儿园家长会老师发言稿Word文档下载推荐.docx
-
中考考点热点之电学分类练习.docx
-
试用期工作总结.docx
-
中考语文总复习常考易错成语集录.docx
-
室外照明漏电保护.docx
-
中图版地理高考一轮复习 第9章 第3节 人类活动对区域地理环境的影响.docx
-
书本打包机课程设计说明书.docx
-
中学高级教师申报表.docx
-
蔬菜业务经营租用冷库合同协议书范本.docx
