 机电一体化期末测试二答案.doc
机电一体化期末测试二答案.doc
- 文档编号:4867218
- 上传时间:2023-05-07
- 格式:DOC
- 页数:2
- 大小:96.50KB
机电一体化期末测试二答案.doc
《机电一体化期末测试二答案.doc》由会员分享,可在线阅读,更多相关《机电一体化期末测试二答案.doc(2页珍藏版)》请在冰点文库上搜索。
机电一体化技术期末测试二参考答案
一、填空题
1.传感器检测系统执行单元计算机控制系统;
2.动态
3.内循环外循环
4.各级相等
5.反应式混合式
6.30°15°
7.脉冲分配器功率放大器
8.中断存储
9.转动惯量小控制
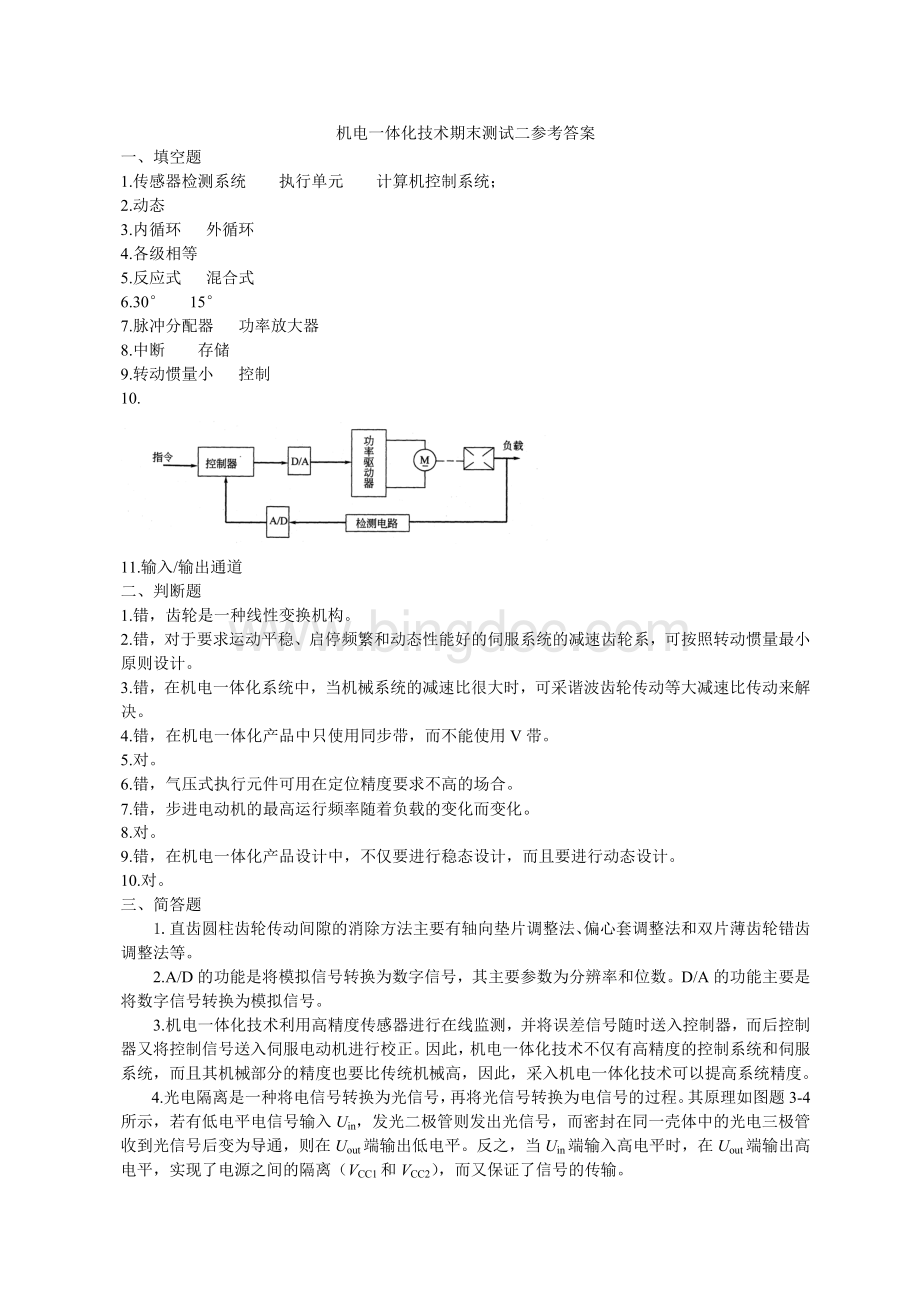
10.
11.输入/输出通道
二、判断题
1.错,齿轮是一种线性变换机构。
2.错,对于要求运动平稳、启停频繁和动态性能好的伺服系统的减速齿轮系,可按照转动惯量最小原则设计。
3.错,在机电一体化系统中,当机械系统的减速比很大时,可采谐波齿轮传动等大减速比传动来解决。
4.错,在机电一体化产品中只使用同步带,而不能使用V带。
5.对。
6.错,气压式执行元件可用在定位精度要求不高的场合。
7.错,步进电动机的最高运行频率随着负载的变化而变化。
8.对。
9.错,在机电一体化产品设计中,不仅要进行稳态设计,而且要进行动态设计。
10.对。
三、简答题
1.直齿圆柱齿轮传动间隙的消除方法主要有轴向垫片调整法、偏心套调整法和双片薄齿轮错齿调整法等。
2.A/D的功能是将模拟信号转换为数字信号,其主要参数为分辨率和位数。
D/A的功能主要是将数字信号转换为模拟信号。
3.机电一体化技术利用高精度传感器进行在线监测,并将误差信号随时送入控制器,而后控制器又将控制信号送入伺服电动机进行校正。
因此,机电一体化技术不仅有高精度的控制系统和伺服系统,而且其机械部分的精度也要比传统机械高,因此,采入机电一体化技术可以提高系统精度。
4.光电隔离是一种将电信号转换为光信号,再将光信号转换为电信号的过程。
其原理如图题3-4所示,若有低电平电信号输入Uin,发光二极管则发出光信号,而密封在同一壳体中的光电三极管收到光信号后变为导通,则在Uout端输出低电平。
反之,当Uin端输入高电平时,在Uout端输出高电平,实现了电源之间的隔离(VCC1和VCC2),而又保证了信号的传输。
图题3-4
四、综合题
1、答:
(1)
(2)为了缩小最大转角误差,应该提高后级齿轮的转角误差。
2、答:
(1)总负载为
设工作台最大速度为v,则电动机的转矩为
如果要求工作台位移的测量精度为0.005mm,并且采用高速端(电动机轴)测量方法,则对应于测量精度的旋转编码器旋转角度为
故旋转编码器每转脉冲数n为
(2)每转500个脉冲时,每个脉冲对应的角度为
所以完全可以满足要求。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 机电 一体化 期末 测试 答案
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 二年级下册数学专项练习-应用题1.docx
二年级下册数学专项练习-应用题1.docx
-
2015年小学六年级英语语法及习题.doc
-
福师2018.8《小学教育管理考核题》答案.doc
-
《西游记》课外阅读汇报课教案.doc
-
初中美术《藏书票》说课稿.doc
-
《乡愁》教学设计与反思.doc
-
17年语文龙岩质检卷(含答案).doc
-
A4作文稿纸模板.doc
-
IBMX5服务器设置流程Word文件下载.docx
-
IE部岗位职责文档格式.doc
-
IPV4向IPV6平滑过渡毕业论文Word下载.doc
-
IP数据包的捕获与分析设计报告Word文档格式.docx
-
IT服务外包及报价文档格式.doc
-
IT项目管理的六种错误思维Word下载.doc
-
IT行业服务话术及处理技巧Word文件下载.docx
-
Java仓库管理系统报告文档格式.doc
-
Java开发中的种设计模式Word格式.doc
-
浙江传媒学院笔试真题.doc
-
欧洲及北美动画史.doc
-
粮食仓储管理制度.doc
-
(完整版)《那个星期天》习题和答案.docx
-
(完整版)机房巡检表.doc
-
小升初数学全真模拟试卷1.doc
-
2022最新教科版五年级下册科学全册教案Word文档下载推荐.docx
-
机械加工件检验标准Word文档格式.docx
-
小升初数学衔接教材北师版学生版.doc
-
初中美术_文明之光——瓷器教学设计学情分析教材分析课后反思Word格式文档下载.docx
-
围堰施工专项施工安全方案文档格式.doc
 中考语文综合探究专题复习用.ppt
中考语文综合探究专题复习用.ppt
-
种植养护实施方案.docx
-
小学数学研究性学习设计方案_四年级数学_数学_小学教育_教育专区.doc
-
综合实践活动《鸟巢创意搭建》教学设计.docx
-
全县经济形势分析会议上的讲话.docx
-
确保行车安全的秘籍.docx
-
鲁教版八年级英语上册5-8单元词汇复习.docx
-
人教版 初三化学教案 上册全套.docx
-
黑龙江省大庆市萨尔图区下半年教师招聘《通用能力测试(教育类)》试题.docx
-
鲁教版七年级上册1-5单元重点短语句型.doc
-
常州2015英语中考试卷(附答案).doc
-
历年(2005-2014)安徽省中考英语试题及答案.doc
-
鲁教版五四制六年级下册英语单词默写四线格.doc
-
历年中考英语单项选择真题精选.doc
-
人教版二年级数学下册有余数的除法综合练习题11.docx
-
有关运动健康的作文.docx
-
揭西县棉湖华侨医院医药护技人员考试试题及解析.docx
-
六合区中考第二次模拟测试英语试题.doc
-
鲁教版初二英语下期中测试题.doc
-
人教版七年级地理上册教案集合12.docx
-
衡水市桃城区妇幼保健院招聘试题【含答案】.docx
-
幼儿演讲稿大全16.docx
-
湖南省株洲市天元区中小学、幼儿园教师进城考试真题库及答案.docx
