 第三章 角 度 测 量.docx
第三章 角 度 测 量.docx
- 文档编号:664325
- 上传时间:2023-04-29
- 格式:DOCX
- 页数:14
- 大小:154.69KB
第三章 角 度 测 量.docx
《第三章 角 度 测 量.docx》由会员分享,可在线阅读,更多相关《第三章 角 度 测 量.docx(14页珍藏版)》请在冰点文库上搜索。
第三章角度测量
第三章角度测量
内容:
理解水平角、竖直角测量的基本原理;掌握光学经纬仪的基本构造、操作与读数方法;水平角测量的测回法和方向观测法;掌握竖盘的基本构造及竖直角的观测、计算方法;掌握光学经纬仪的检验与校正方法;了解水平角测量误差来源及其减弱措施及电子经纬仪的测角原理及操作方法。
重点:
光学经纬仪的使用方法;水平角测回法测量方法;竖直角测量方法;
难点:
光学经纬仪的检验与校正。
§3.1角度测量原理
角度测量(angularobservation)包括水平角(horizontalangle)测量和竖直角(verticalangle)测量。
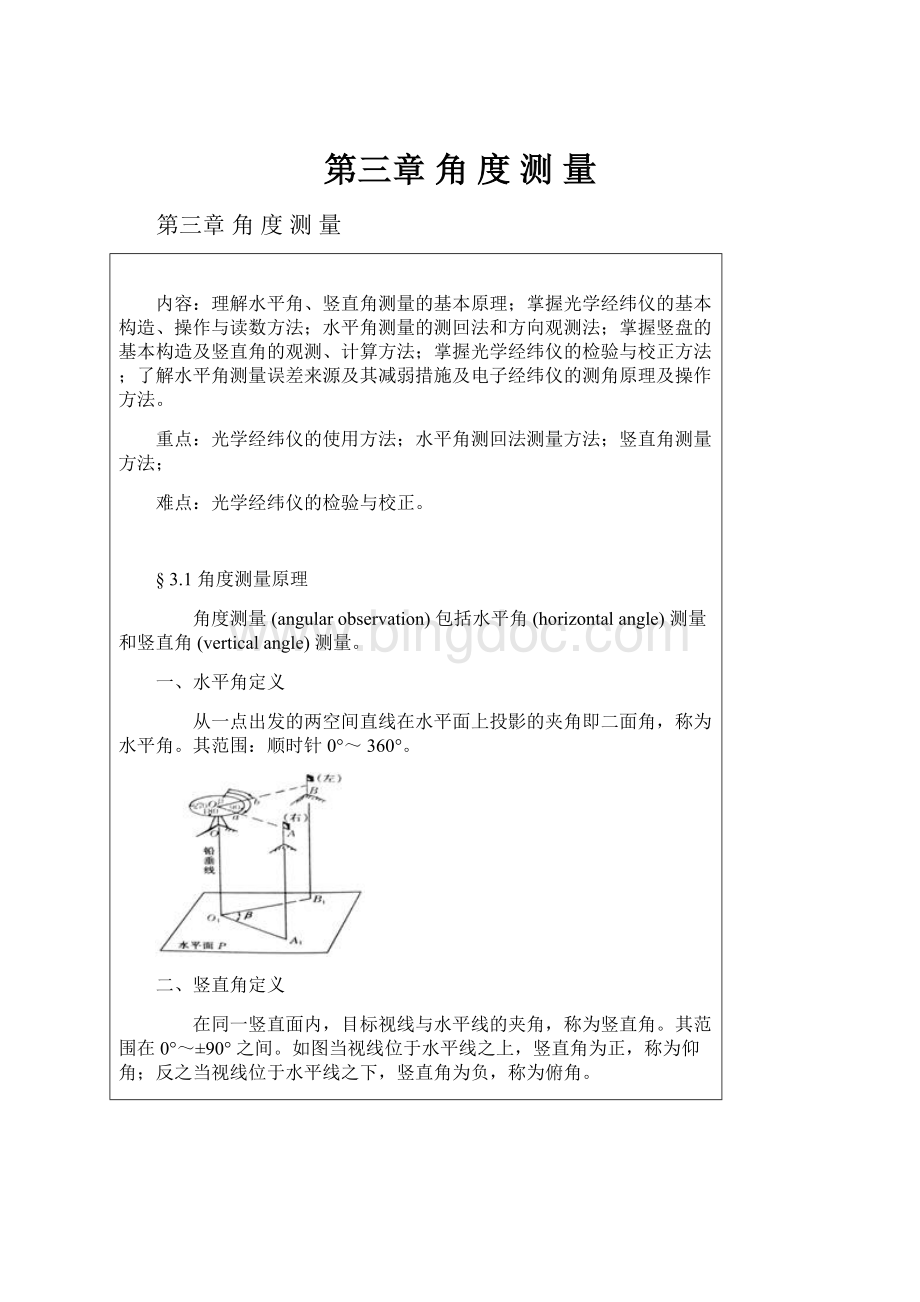
一、水平角定义
从一点出发的两空间直线在水平面上投影的夹角即二面角,称为水平角。
其范围:
顺时针0°~360°。
二、竖直角定义
在同一竖直面内,目标视线与水平线的夹角,称为竖直角。
其范围在0°~±90°之间。
如图当视线位于水平线之上,竖直角为正,称为仰角;反之当视线位于水平线之下,竖直角为负,称为俯角。
§3.2光学经纬仪(opticaltheodolite)
经纬仪是测量角度的仪器。
按其精度分,有DJ6、DJ2两种。
表示一测回方向观测中误差分别为6"、2"。
一、DJ6光学经纬仪的构造
DJ6光学经纬仪图
1、照准部(alidade)
2、水平度盘(horizontalcircle)
3、基座(tribrach)
二、J6的读数方法
1、J6经纬仪采用“分微尺测微器读数法”,分微尺的分划值为1ˊ,估读到获0.1ˊ(即:
6")。
如图,水平度盘读数为:
73°04ˊ24"。
2、“H”——水平度盘读数,“V”——竖直度盘读数。
三、J2光学经纬仪的构造
如图与J6相比,增加了:
1、测微轮——用于读数时,对径分划线影像符合。
2、换像手轮——用于水平读数和竖直读数间的互换。
3、竖直读盘反光镜——竖直读数时反光。
四、J2的读数方法
一般采用对径重合读数法——转动测微轮,使上下分划线精确重合后读数。
五、经纬仪的安置
内容及要求:
对中(centering)±小于3mm
整平(leveling)小于1格
1、垂球对中整平法步骤
(1)移动或伸缩三脚架(粗略对中)
(2)脚架头上移动仪器(精确对中)
(3)旋转脚螺旋使水准管气泡居中(整平)
(4)反复
(2)、(3)两步。
2、光学对中整平法步骤
(1)大致水平大致对中
眼睛看着对中器,拖动三脚架2个脚,使仪器大致对中,并保持“架头”大致水平。
(2)伸缩脚架粗平
根据气泡位置,伸缩三脚架2个脚,使圆水准气泡居中。
(3)旋转三个脚螺旋精平
按“左手大拇指法则”旋转三个脚螺旋,使水准管气泡居中。
1)转动仪器,使水准管与1、2脚螺旋连线平行。
2)根据气泡位置运用法则,对向旋转1、2脚螺旋。
3)转动仪器90°,运用法则,旋转3脚螺旋。
(4)架头上移动仪器,精确对中
(5)脚螺旋精平。
(6)反复(4)、(5)两步。
旋转三个脚螺旋进行精平的示意图
§3.3水平角测量(horizontalangleobservation)
水平角的测量方法常用的有测回法(methodofobservationset)、方向观测法(methodofdirectionobservation)。
一、经纬仪(theodolite,transit)的安置
内容及要求:
对中(centering)小于±3mm
整平(leveling)小于1格
1、垂球(plumbbob)法
2、光学对中器(opticalplummet)法
二、瞄准方法
步骤:
粗瞄—制动—调焦—微动精瞄。
两个基本概念:
盘左(正镜)、盘右(倒镜)
三、测回法
1、适用:
两个方向的单角(∠AOB)。
2、观测步骤:
(1)盘左瞄准左边A,配度盘至0°0X′,读取a1。
(2)顺时针旋转瞄准右边B,读取b1。
则上半测回角值:
β1=b1-a1。
(3)倒镜成盘右,瞄准右边B,读取b2。
(4)逆时针旋转瞄准左边A,读取a2。
则下半测回角值:
β2=b2-a2
(5)计算角值。
若β1-β2≤±40"(图根级)则有:
β=(β1+β2)/2
3、记录格式
测站
盘位
目标
水平度盘读数
°′″
半测回角值
°′″
一测回角值
°′″
备注
O
左
A
000112
701236
701233
B
701348
右
A
1800124
701230
B
2501354
若要观测n个测回,为减少度盘分划误差,各测回间应按180°/n的差值来配置水平度盘。
测回法测水平角方法,可小结如下:
四、方向观测法
1、适用:
在一个测站上需要观测两个以上方向。
2、观测步骤:
(如下图,有四个观测方向)
(1)上半测回
选择一明显目标A作为起始方向(零方向),用盘左瞄准A,配置度盘,顺时针依次观测A、B、C、D、A。
(2)下半测回
倒镜成盘右,逆时针依次观测A、D、C、B、A。
同理各测回间按180°/n的差值,来配置水平度盘。
3、记录、计算
(1)2C值(两倍照准误差):
2C=盘左读数-(盘右读数±180°)。
一测回内2C互差,对J2≤18"。
对J6不作要求。
(2)半测回归零差:
对J2≤12";对J6≤18"。
(3)各方向盘左、盘右读数的平均值:
平均值=[盘左读数+(盘右读数±180°)]/2
注意:
零方向观测两次,应将平均值再取平均。
(4)归零方向值:
将各方向平均值分别减去零方向平均值,即得各方向归零方向值。
(5)各测回归零方向值的平均值:
同一方向值各测回间互差,对J2≤12";对J6≤24"。
方向观测法可小结如下:
§3.4竖直角测量
一、竖直度盘(verticalcircle)的构造
1、竖直度盘的构造包括:
(1)竖盘(verticalcircle)
(2)竖盘指标水准管(verticalindexbubbletube)
(3)竖盘指标水准管微动螺旋。
其中,竖盘指标水准管和竖盘指标水准管微动螺旋,可采用竖盘指标自动归零补偿器(verticalindexcompensator)来替代。
2、指标线固定不动,而整个竖盘随望远镜一起转动。
3、竖盘的注记形式有顺时针与逆时针两种。
二、竖直角(verticalangle)的计算公式
1、顺时针注记形式
故有:
α左=90°-L,α右=R-270°
一测回竖直角α=(α左+α右)/2
2、逆时针注记形式
有:
α左=L-90°,α右=270°-R
一测回的竖直角为:
α=(α左+α右)/2
三、竖盘指标差(indexerrorofverticalcircle)
1、定义
由于指标线偏移,当视线水平时,竖盘读数不是恰好等于90°或270°上,而是与90°或270°相差一个x角,称为竖盘指标差。
当偏移方向与竖盘注记增加方向一致时,x为正,反之为负。
2、计算公式
(1)指标差:
x=(L+R-360°)/2
对于顺时针注记的:
正确的竖直角α=(90°+x)-L=α左+x
α=R-(270°+x)=α右-x
(2)结论:
取盘左盘右的平均值,可消除指标差的影响。
四、竖直角的观测及记录(格式见表)
一般规范规定,指标差变动范围,J6≤25"、J2≤15"。
测站
目标
盘位
竖盘读数
°′″
半测回竖直角
°′″
指标差
(")
一个测回竖直角
°′″
备注
O
M
左
764512
131448
-6
131442
竖直度盘是顺时针注记的。
右
2831436
131436
N
左
1220336
-320336
12
-320324
右
2375648
-320312
§3.5光学经纬仪的检验与校正
如图所示,经纬仪的主要轴线:
1、竖轴VV(verticalaxis)
2、水准管轴LL(bubbletubeaxis)
3、横轴HH(horizontalaxis)
4、视准轴CC(collimationaxis)
5、圆水准器轴L'L'(circlebubbleaxis)
一、经纬仪轴线应满足的条件
1、VV⊥LL——照准部水准管轴的检校。
2、HH⊥十字丝竖丝——十字丝竖丝的检校
3、HH⊥CC——视准轴的检校
4、HH⊥VV——横轴的检校
5、竖盘指标差应为零——指标差的检校
6、光学垂线与VV重合——光学对中器的检校
7、圆水准轴L'L'∥VV——圆水准器的检验与校正(次要)
二、经纬仪的检验与校正
1、照准部水准管轴的检校
(1)检验:
用任意两脚螺旋使水准管气泡居中,然后将照准部旋转180°,若气泡偏离1格,则需校正。
(2)校正:
用脚螺旋使气泡向中央移动一半后,再拨动水准管校正螺丝,使气泡居中。
此时若圆水准器气泡不居中,则拨动圆水准器校正螺丝。
2、十字丝竖丝的检校
(1)检验:
用十字丝交点对准一目标点,再转动望远镜微动螺旋,看目标点是否始终在竖丝上移动。
(2)校正:
微松十字丝的四个压环螺丝,转动十字丝环,使目标点始终在竖丝上移动。
3、视准轴的检校
(1)检验:
如图,在平坦地面上选择一直线AB,约60m~100m,在AB中点O架仪,并在B点垂直横置一小尺。
盘左瞄准A,倒镜在B点小尺上读取B1;再用盘右瞄准A,倒镜在B点小尺上读取B2。
J6:
2c>60";J2:
2c>30"时,则需校正。
(2)校正:
拨动十字丝左右两个校正螺丝,使十字丝交点由B2点移至BB2中点B3。
4、横轴的检验与校正
(1)检验:
如图,在20—30m处的墙上选一仰角大于30°的目标点P,先用盘左瞄准P点,放平望远镜,在墙上定出P1点;再用盘右瞄准P点,放平望远镜,在墙上定出P2点。
对J6经纬仪:
i>20"时,则需校正。
(2)校正:
用十字丝交点瞄准P1P2的中点M,抬高望远镜,并打开横轴一端的护盖,调整支承横轴的偏心轴环,抬高或降低横轴一端,直至交点瞄准P点。
此项校正一般由仪器检修人员进行。
5、指标差的检校
(1)检验:
用盘左、盘右先后瞄准同一目标,计算指标差x=(L+R-360°)/2。
对J6经纬仪:
x>1′;J2经纬仪:
x>30"时,要进行校正。
(2)校正:
用指标水准管微动螺旋使中丝对准(R-x)位置,再有拨针使指标气泡居中。
6、光学对中器的检校
(1)检验:
精密安置仪器后,将刻划中心在地面上投下一点,再旋转照准部,每隔120°投下一点,若三点不重合,则需校正。
(2)校正:
用拨针使刻划中心向三点的外接圆心移动一半。
7、圆水准器的检校(次要)
(1)检验:
精平(水准管气泡居中)后,若圆水准气泡不居中,则需校正。
(2)校正:
用圆水准气泡校正螺丝使其居中。
§3.6水平角观测的误差分析
一、仪器构造误差
(一)视准轴误差的影响,盘左盘右观测的平均值可抵消该误差。
(二)横轴不水平误差的影响,盘左盘右观测的平均值可抵消该误差。
(三)纵轴误差的影响
(1)纵轴误差的影响不仅随观测目标的垂直角的增大而增大,而且与横轴所处的方向有关;
(2)盘左盘右取平均不能消除该项误差。
(四)照准部偏心差的影响在度盘对径方向上读取读数而取平均值的方法及盘左、盘右读数的平均值都可消除该项误差的影响。
(五)其他仪器误差的影响度盘刻划不均匀误差,竖盘指标差。
二、与观测者有关的误差
(1)仪器对中误差
(2)目标偏心误差
(3)照准误差
(4)读数误差
三、与外界条件有关的误差
(1)温度的变化
(2)大风的影响
(3)大气折光
(4)大气透明度
(5)地面稳定性
四、角度测量的注意事项:
1、观测前应检校仪器。
2、安置仪器要稳定,应仔细对中和整平。
一测回内不得再对中整平。
3、目标应竖直,尽可能瞄准目标低部。
4、严格遵守各项操作规定和限差要求。
5、当对一水平角进行m个测回观测,各测回应配度盘,每测回观测度盘起始读数变动值为180/m
6、观测时尽量用十字丝中间部分。
水平角用竖丝,竖直角用横丝。
7、读数应果断、准确。
特别应注意估读数。
当场计算,如有错误或超限,应立即重测。
8、选择有利的观测时间和避开不利的外界条件。
§3.7电子经纬仪
60年代以来,随着近代光学、电子学的发展,使角度测量向自动化记录方向改进有了技术基础,从而出现了电子经纬仪等自动化测角仪器。
电子经纬仪在结构及外现上和光学经纬仪相类似,主要不同点在于读数系统,它采用光电扫描和电子元件进行自动读数和液晶显示。
电子测角虽然仍旧是采用度盘来进行,但不是按度盘上的刻划,用光学续数法读取角度值,而是以度盘上取得电信号,再将电信号转换成角度值。
电子测角的度盘主要有编码度盘、光栅度盘和动态测角度盘三种形式。
因此,电子测角也就有编码度盘测角,光栅度盘测角和编码度盘结合测角,以及动态测角等四种形式。
如瑞士克恩(KERN)厂的E1型和E2型电子经纬仪采用光栅度盘,德国OPTONJ于1978年生产的Elta-2型电子速测仪,采用的是编码度盘,而现在主流速测仪的测角系统大多用的是动态测角系统,测角精度可达0.5″。
从90年代起,国内厂家如北京光学仪器厂、南方测绘仪器公司生产的电子经纬仪测角精度均在在5″左右。
以下是北京和苏州生产的两款电子经纬仪。


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第三章 第三
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 建筑工程编制依据及概况.docx
建筑工程编制依据及概况.docx
-
建筑工程质量控制点土建类.docx
-
建筑设计师的总结报告最新版.docx
-
建筑制图基础机考网考题库及复习资料.docx
-
健身房经营管理方案之欧阳科创编.docx
-
江苏省计算机二级VB考试真题及参考答案.docx
-
江西省新余市事业单位《职业能力测验》教师教育与答案.docx
-
交通信号灯及路灯施工方案.docx
-
教改课题申报书填写技巧.docx
-
教师读书活动总结4篇.docx
-
教师考核表评语.docx
-
幼儿园园务工作总结.docx
-
幼儿园中班配班个人工作计划范文五篇.docx
-
幼教考试作文写作.docx
-
热门财务述职报告锦集5篇.docx
-
人教 模块一Unit1 学案.docx
-
人教版 九年级上册 新初三暑假衔接课程 圆 第一二课时 含习题和答案教育文档.docx
-
人教版地理初二上学期综合检测卷一含答案.docx
-
人教版高二英语选修7单词表doc.docx
-
商务与经济统计作业仅供参考.docx
-
上半年安徽省安全工程师安全生产法行政处罚的概念试题.docx
-
上半年贵州省安顺市平坝区事业单位《职业能力倾向测验》试题及答案.docx
-
学年高中英语高考提能练Unit1Schoollife仿真检测灵活拆组卷牛津译林版必修1.docx
-
学年家长学校工作总结.docx
-
THE PORTABLE WEBSITE.docx
-
学校教务处工作总结4篇.docx
-
学校组织一次义卖会方案.docx
-
XX规划局大型展览馆改扩建工程项目可行性研究报告.docx
-
验工计价管理办法.docx
-
XX农家乐生态园投资经营项目商业计划书.docx
-
液晶材料市场分析报告.docx
-
XX乡村电子商务服务站项目投资建设运营方案.docx
-
演示素材计算机基础知识.docx
-
药品仓库管理系统的需求分析.docx
-
一个好的商超经营方案.docx
-
一年级语文《ao ou iu》第一课时教学设计之一教案文本.docx
-
防灾救灾.docx
-
房地产外拓总结.docx
-
医药销售实习心得体会范文5篇.docx
-
医院人员绩效考核表.docx
-
肺结核应急处置预案.docx
-
易用进销存使用手册.docx
-
风湿科骨科用药.docx
-
扶梯问题六年级.docx
-
英语师范专业实习自我鉴定.docx
-
福建省莆田第九中学学年高一物理上学期第一次月考试题.docx
-
邮政短信平台项目技术方案.docx
-
幼儿顶岗实习报告10篇.docx
-
甘肃中医药大学专升本考试.docx
-
干挂石材幕墙工程.docx
-
钢结构厂房安装合同范本钢结构厂房安装合同格式.docx
