 数控技术专业《第3章 数控机床冷却控制系统装调》.docx
数控技术专业《第3章 数控机床冷却控制系统装调》.docx
- 文档编号:7478362
- 上传时间:2023-05-11
- 格式:DOCX
- 页数:45
- 大小:2.68MB
数控技术专业《第3章 数控机床冷却控制系统装调》.docx
《数控技术专业《第3章 数控机床冷却控制系统装调》.docx》由会员分享,可在线阅读,更多相关《数控技术专业《第3章 数控机床冷却控制系统装调》.docx(45页珍藏版)》请在冰点文库上搜索。
数控技术专业《第3章数控机床冷却控制系统装调》
情境3数控机床冷却控制系统装调
情境导入
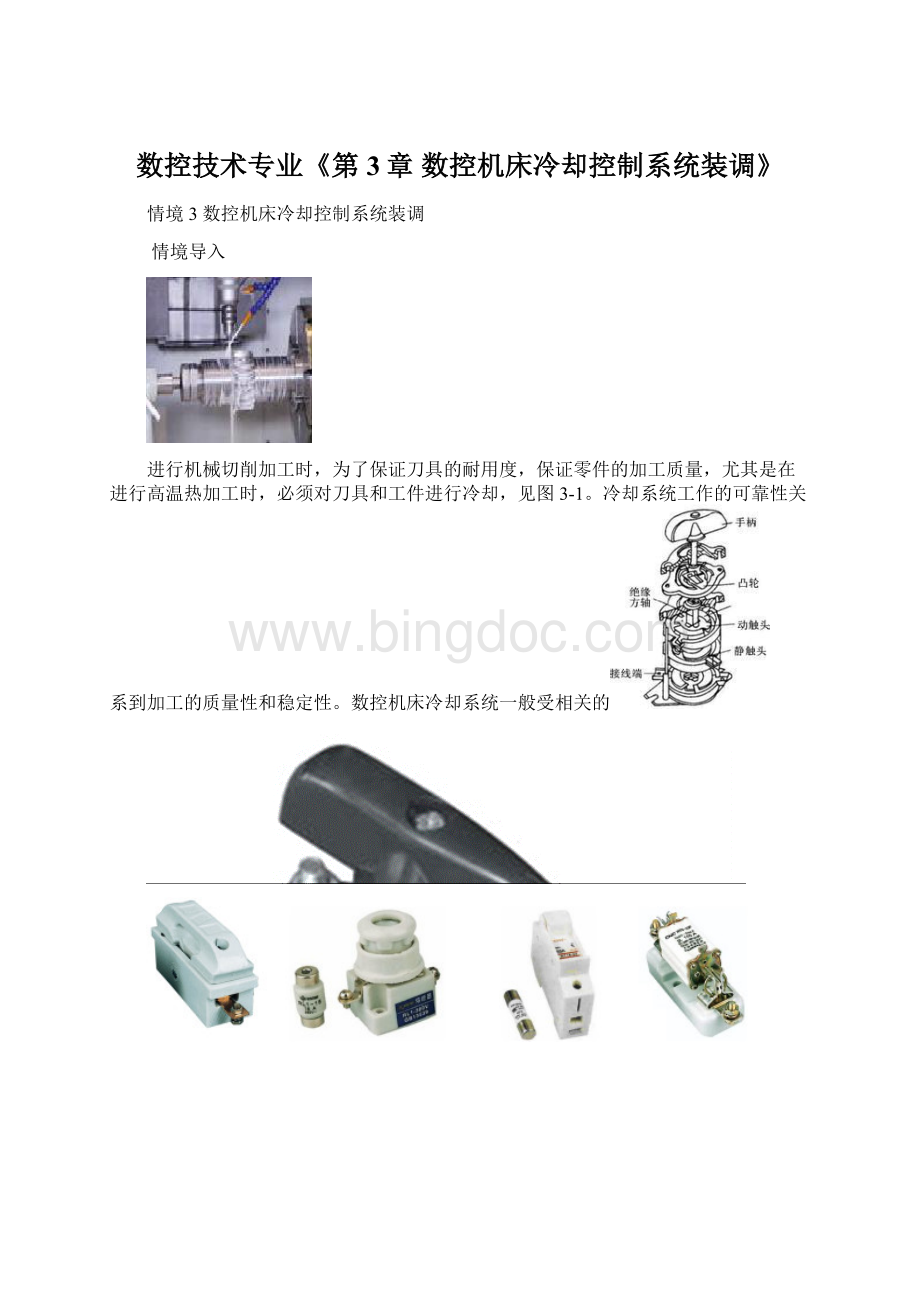
进行机械切削加工时,为了保证刀具的耐用度,保证零件的加工质量,尤其是在进行高温热加工时,必须对刀具和工件进行冷却,见图3-1。
冷却系统工作的可靠性关系到加工的质量性和稳定性。
数控机床冷却系统一般受相关的
ema∑Ime
注:
In熔断器的额定电流;Ime电动机的额定电流;Imema多台电动机容量最大的一台电动机的额定电流;∑Ime其余电动机的额定电流之和。
电动机末端回路的保护,选用aM型熔断器,熔断体的额定电流In稍大于电动机的额定电流;另外为防止发生越级熔断,上、下级〔即供电干、支线〕熔断器间应有良好的协调配合,应进行较详细的整定计算和校验。
〔4〕熔断器安装及使用考前须知
1〕安装前检查熔断器的型号、额定电流、额定电压、额定分断能力等参数是否符合规定要求。
2〕安装熔断器除保证足够的电气距离外,还应保证足够的间距,以便于拆卸、更换熔体。
3〕安装时应保证熔体和触刀,以及触刀和触刀座之间接触紧密可靠,以免由于接触处发热,使熔体温度升高,发生误熔断。
4〕安装熔体时必须保证接触良好,不允许有机械损伤,否那么准确性将降低。
5〕熔断器应安装在各相线上,三相四线制电源的中性线上不得安装熔断器,而单相两线制的零线上应安装熔断器。
6〕瓷插式熔断器安装熔丝时,熔丝应顺着螺钉旋紧方向绕过去,同时应注意不要划伤熔丝,也不要把熔丝绷紧,以免减小熔丝截面尺寸或绷断熔丝。
7〕安装螺旋式熔断器时,必须注意将电源线接到瓷底座的下接线端〔即低进高出的原那么,以保证平安。
8〕更换熔丝,必须先断开电源,一般不应带负载更换熔断器,以免发生危险。
9〕在运行中应经常注意熔断器的指示器,以便及时发现熔体熔断,防止缺相运行。
10〕更换熔体时,必须注意新熔体的规格尺寸、形状应与原熔体相同,不能随意更换。
4接触器
接触器是一种用来频繁地接通或分断带有负载的主电路〔如电动机〕的自动控制电器。
接触器由电磁机构、触点系统、灭弧装置及其他部件四局部组成。
其中电磁机构由线圈、动铁芯和静铁芯组成;触点机构包括三对主触点〔通断主电路〕、辅助触点〔通断控制电路〕。
接触器的工作原理是当线圈通电后,铁芯产生电磁吸力将衔铁吸合,衔铁带动触点系统动作,使常闭触点断开,常开触点闭合。
当线圈断电时,电磁吸力消失,衔铁在反作用弹簧力的作用下回位,触点系统随之复位。
接触器按其线圈通过电流的种类不同,分为直流接触器和交流接触器两种,机床上应用最多的是交流接触器。
目前我国常用的交流接触器的主要有CJ2021JX1、CJX2、CJ12和CJ10等系列,其实物图如图3-12所示,型号及含义见图3-13。
接触器的图形符号和文字符号如图3-14所示。
工作原理如图3-15所示。
图3-12交流接触器实物图
图3-13交流接触器型号
图3-14接触器图形符号和文字符号
图3-15接触器工作原理图
〔1〕接触器主要技术参数
1〕额定电压接触器铭牌上标出的额定电压是指主触点的额定电压。
2〕额定电流接触器铭牌上标出的额定电流是指主触点的额定电流。
3〕接通和分断能力接通和分断能力是指接触器主触点在规定条件下能可靠地接通和分断的电流值。
在此电流值以下,接触器接通时主触点不应发生熔焊;接触器分断时主触点不应发生长时间的燃弧。
假设超出此电流值,那么熔断器、断路器等保护电器会将电流分断。
接触器的使用类别不同,对主触点的接通和分断能力的要求也不一样。
接触器的使用类别是根据不同的控制对象〔负载〕和所需的控制方式所规定的。
常见的接触器使用类别及其典型用途见表3-1。
表3-1常见接触器使用类别及其典型用途
电流类型
使用类别代号
典型用途
交流
AC1
AC2
AC3
AC4
无感或微感负载、电阻炉
绕线转子异步电动机的起动和停止
笼型异步电动机的起动和停止
笼型异步电动机的起动、反向制动、反向和点动
直流
DC1
DC3
DC5
无感或微感负载、电阻炉
并励电动机的起动、反接制动、反向和点动
串励电动机的起动、反接制动、反向和点动
〔2〕交流接触器的选择
交流接触器的选择主要考虑主触点的额定电压、额定电流、辅助触点的数量与种类、吸引线圈的电压等级、操作频率等。
1〕根据接触器所控制负载的工作任务来选择相应使用类别的接触器。
如果负载为一般任务〔控制中小功率笼型电动机等〕,选用AC3类接触器。
如果负载为重任务〔电动机功率大,且动作较频繁〕,那么应选用AC4类接触器。
如果负载为一般任务与重任务混合的情况。
那么应根据实际情况选用AC3或AC4类接触器。
2〕交流接触器的额定电压〔主触点的额定电压〕一般为500V和380V两种,应大于或等于负载电路的电压。
3〕根据电动机〔或其他负载〕的功率和操作情况来确定接触器主触点的电流等级。
接触器的额定电流主触点的额定电流有5A、10A、202140A、60A、100A和150A等几种,应大于或等于被控电路的额定电流。
②电动机类负载可按以下经验公式计算:
Ic=
in
电动机
型号
额定功率/W
满载转速/r/min
同步转速3000r/min,2极
同步转速1500r/min,4极
Y801-2
2825
Y801-4
1390
Y802-2
Y802-4
1390
Y90S-2
2840
Y90S-4
1400
Y90L-2
2840
Y90L-4
1400
Y100L-2
3
2880
Y100L1-4
142021
Y112M-2
4
2890
Y100L2-4
3
142021
Y132S1-2
2900
Y112M-4
4
1440
Y132S2-2
2900
Y132S-4
1440
Y160M1-2
11
2930
Y132M-4
1440
Y160M2-2
15
2930
Y160M-4
11
1460
Y160L-2
2930
Y160L-4
15
1460
Y180M-2
22
2940
Y180M-4
1470
Y200L1-2
30
2950
Y180L-4
22
1470
同步转速1000r/min,6极
Y200L-4
30
1470
Y90S--6
910
同步转速750r/min,8极
Y90L-6
910
Y132S-8
710
Y100L-6
940
Y132M-8
3
710
Y112M-6
940
Y160M1-8
4
72021
Y132S-6
3
960
Y160M2-8
72021
Y132M1-6
4
960
Y160L-8
72021
Y132M2-6
960
Y180L-8
11
730
Y160M-6
970
Y200L-8
15
730
Y160L-6
11
970
Y225S-8
730
Y180L-6
15
970
Y225M-8
22
730
Y200L1-6
970
Y250M-8
30
730
Y200L2-6
22
970
Y225M-6
30
980
注:
电动机型号意义:
以Y132S2-2-B3为例,Y表示系列代号,132表示机座中心高,S2表示短机座和第二种铁心长度〔M表示中机座,L表示长机座〕,2表示电动机的极数,B3表示安装形式。
三相异步电机起动点动控制
中小型异步电动机可采用直接启动方式,启动时将电动机的定子绕组直接接在额定电压的交流电源上。
点动控制就是直接起动的一种方式。
图3-26为点动控制线路示意图,图3-27所示为电动机点动控制电气原理图,图中组合开关QS、熔断器FU1、交流接触器KM的主触点与电动机组成主电路,主电路中通过电流较大。
控制电路由熔断器FU2、起动按钮SB、接触器KM的线圈组成,控制电路中通过的电流较小。
控制电路的工作原理如下:
接通电源开关QS,按下起动按钮SB,接触器KM的吸引线圈得电,常开主触点闭合,电动机绕组接通三相电源,电动机起动。
松开起动按钮SB,接触器吸引线圈失电,主触点分开,切断三相电源,电动机停止。
电路中,所有电器的触点都按电器没有通电和没有外力作用时的初始状态画出,如接触器触点按线圈不通电时的状态画出;按钮按不受外力作用时的状态画出。
图3-26点动控制线路示意图图3-27电动机点动控制电气原理图
三相异步电机起动长动控制
图3-28为三相异步电机长动控制线路示意图,图3-29所示为长动控制电气原理图,其工作原理如下:
接通电源开关QS,按下起动按钮SB2时,接触器KM吸合,主电路接通,电动机M起动运行。
同时并联在起动按钮SB2两端的接触器辅助常开触点也闭合,所以即使松开按钮SB2,控制电路也不会断电,电动机任然继续运行。
按下停止按钮SB1时,KM线圈断电,接触器所有触点断开,切断主电路,电动机停转。
这种依靠接触器自身的辅助触点来使其线圈保持通电的现象称为“自锁〞或“自保〞。
图3-28长动控制线路示意图图3-28电动机长动控制电气原理图
在实际生产中,往往需要既可以点动又可以长动的控制电路,其主电路相同,但是控制电路可以多种,如图3-29所示。
图3-29点动与长动控制电路
比拟图3-29所示的三种控制电路,图a比拟简单,它是以开关SA的翻开与闭合来区别点动与长动的;由于启动均用同一按钮SB2控制,假设疏忽了开关动作,就会混淆长动与点动的作用。
图b虽然将点动按钮SB3与长动按钮SB2分开了,但当接触器铁心因油腻或剩磁而发生缓慢释放时,可能会使点动变成长动,故虽然简单但并不可靠。
图c采用中间继电器实现点动控制,可靠性大大提高;点动时按SB3,中间继电器KA的常闭触点断开接触器KM的自锁触点,KA的常开触点使KM通电,电动机点动;连续控制时,按SB2即可。
任务实施
按照图3-30完成长动控制电路的接线与调试。
图3-30电动机长动控制电路接线实物图与原理图
1)查看各电器元件质量情况,详细观察各电器元件外部结构,了解其使用方法,并进行安装。
2)按图3-24所示的电路图正确连接电路,按照从上到下、从左到右、先连接主电路、再连接控制电路的顺序进行接线。
3)对照电路图检查电路是否有掉线、错线、接线是否牢固。
学生要自行检查和互检,确认安装的电路正确和无平安隐患,经指导教师检查前方可通电试验。
切记要严格遵守操作规程,确保人身平安
4)接通总电源,合上开关,按下按钮SB观察长动的现象。
检查评价
在自觉遵守平安文明生产规程的前提下,考核标准见表3-4。
表3-4考核标准
教学内容
评价要点
评价标准
评价方式
考核方式
分数权重
电动机的长动控制电路连接及调试
电路分析
正确分析电路原理
教师评价
辩论
电路连接
按图接线正确、标准、合理
操作
测试运行
按照要求和步骤正确调试电路
操作
工作态度
认真、主动参与学习
小组成员互评
口试
团队合作
具有团队合作精神
口试
任务2:
三相异步电机星三角降压起动
mable Logic Controller,简称
s到上百ms。
值得注意的是,不同指令其执行时间是不同的,从零点几μs到上百μs不等,应选用不同指令所用的扫描时间将会不同。
而对于一些需要高速处理的信号,那么需要特殊的软、硬件措施来处理。
根据上述
in,占空比为的时钟。
该位提供了一个周期为1S,占空比为的时钟。
该位为扫描时钟,本次扫描置1,下次扫描置0,交替循环。
可作为扫描计数器的输入。
该位指示Cs、10ms、100ms。
定时器有以下两种寻址形式。
●当前值寻址:
16位有符号整数,存储定时器所累计的时间。
●定时器位寻址:
根据当前值和预置值的比拟结果置位或者复位。
两种寻址使用同样的格式:
T定时器编号。
例如:
T37
计数器区〔C〕
在S7-2021Cs后,KM2接触器线圈得电,电动机按照三角形连接转动。
不考虑过载保护。
按下SB2,或者关闭电源,电机停止。
1输入点和输出点分配
输入点和输出点I/O分配见表3-6。
表3-6I/O点分配表
输入量
输出量
元件代号
功能
输入点
元件代号
功能
输出点
SB1
起动按钮
X0
KM1
主接触器
Y0
SB2
停止按钮
X1
KM2
三角形连接接触器
Y1
KM1
接触器常闭触点
X2
KM3
星形连接接触器
Y2
KM2
接触器常闭触点
X3
2
1、
1、
A以上。
直流输出信号为有源型输出信号,如图3-72所示。
输出信号可驱动机床侧的继电器圈或白炽指示灯负载,驱动器ON时最大负载电流2021A,电源电压为DC24V。
输出负载为感性负载〔如继电器〕时,应在继电器线圈反向并联续流二极管;输出负载为白炽指示灯负载时,应接入限流电阻。
a〕漏极型输入接线b〕有源型输入的接线
图3-71FANUC-0i系统的直流输入信号接口
a〕输出信号驱动继电器负载b〕输出信号驱动白炽灯负载
图3-72FANUC0i系统的直流输出信号接口
FANUC0i系统
s
8ms
8ms
根本指令执行时间
步
步
步
程序容量-梯形图
最大约12021步
最大约12021步
最大约64000步
符号和注释
1-128KB
1-128KB
不限制
信息显示
8-64KB
8-64KB
不限制
根本指令数
14
12
14
功能指令数
66
48
69
继电器〔R〕
1000字节
1000字节
8500字节
外部继电器〔E〕
无
无
8000字节
信息显示请求位〔A〕
25字节
25字节
500字节
非易失性存储区数据表〔D〕
1860字节
1860字节
10000字节
可变定时器〔T〕
40个〔80字节〕
40个〔80字节〕
250个〔1000字节〕
固定定时器〔T〕
100个
100个
500个
计数器〔C〕
202180字节〕
202180字节〕
100个〔400字节〕
固定计数器〔C〕
无
无
100个〔2021节〕
保持型继电器〔K〕
2021
2021
12021
子程序
128KB
FlashROM128KB
FlashOM128KB-76KB
2FANUCOi系统
T侧到T→C而直接由CNC监控。
这些信号的输入地址是固定的,CNC运行时直接引用这些地址信号
〔2〕从C→MT〕
如果采用I/OLINK时,其输出信号地址为Y0~Y127;如果采用内装I/O卡时,FANUC-0iA系统的输出信号地址为Y1000~Y100872点输入、FANUC-0iB系统的输出信号地址为Y0~Y872点输入。
〔3〕从C→CNC〕
从C的输入信号地址〔CNC→C的输入地址信号号为F0~F255,这些信号的功能也是固定的,用户通过顺序程序〔梯形图〕确定CNC系统的状态。
如CNC系统准备就绪信号为、伺服准备就绪信号为、系统报警信号为、系统电池报警信号为、系统复位信号为、系统进给暂停信号为,系统循环起动信号为、T码选通信号为、M码选通信号为、S码选通信号为等。
〔5〕保持型继电器地址〔K〕
FANUC-0iAt的保持型继电器地址为K0~K19,其中K16~K19是专用继电器,不能作为他用。
FANUC-0iB/0ICC-SB7才有外部继电器。
〔7〕信息继电器地址〔A〕
信息继电器通常用于报警信息显示请求,FANUC-0IA/0iB系统有2021信息继电器〔占用25个字节〕,其地址为A0~A24。
FANUC-0iC有2021个信息继电器〔500字节〕。
除此之外,还有定时器地址〔T〕、计数器地址〔C〕、数据表地址〔D〕、子程序号地址〔C的主要信号功能
从CNC到C到CNC的输出信号〔表3-11〕的功能是固定的,用户通过梯形图实现CNC各种控制功能或确定CNC系统的状态。
表3-10CNC到
码选通
S码选通
T码选通
自动运行
主轴使能
自动状态
X轴回零到达信号
Z轴回零到达信号
X轴回零建立信号
X轴回零建立信号
表3-11从
、S、T功能完成信号
外部复位
参考点返回信号
起动锁住信号
手摇X轴
跳步
循环起动
手摇Z轴
机床锁住
所有坐标轴互锁信号
快速信号
程序单段
急停
主轴停
空运行
进给保持
主轴
D1、MD2、MD4。
方式选择为格雷码〔即代码中仅有1位与相邻位不同〕,见表3-12。
表3-12工作方式选择信号表
序号
方式
信号状态
MD4
MD2
MD1
DNC1
ZRN
1
编辑〔EDIT〕
0
1
1
0
0
2
存储器运行〔MEN〕
0
0
1
0
0
3
手动数据输入〔MDI〕
0
0
0
0
0
4
手轮进给〔HANDLE/IN〕
1
0
0
0
0
5
手动连续进给〔JOG〕
1
0
1
0
0
6
手轮示教〔TEACHINHANDLE〕
1
1
1
0
0
7
手动连续示教〔TEACHINJOG〕
1
1
0
0
0
8
DNC运行〔RMT〕
0
0
1
1
0
9
手动返回参考点〔REF〕
1
0
1
0
1
4FANUC系统C的指令有两类:
根本指令和功能指令。
根本指令只是对二进制进行逻辑操作,而功能指令是对二进制字节或字进行一些特定功能的操作。
〔1〕根本指令共12条,指令及处理见表3-13
表3-13FANUC根本指令表
〔2〕功能指令
数控机床用代码选通信号,F为移动指令分配结束信号,F10为FANUC-0i系统的M代码输出信号地址。
图3-74DEC指令应用实例
2〕DECB指令
DECB指令的功能是可对1、2或4个字节的二进制代码数据译码,所指定的8位连续数据之一与代码数据相同时,对应的输出数据位为1。
DECB指令主要用于M代码、T代码的译码,一条DECB代码可译8个连续M代码或8个连续T代码。
图3-75为DECB译码指令格式和应用实例。
图3-75DECB指令的应用实例
DECB指令格式如图3-75a所示,主要包括以下几项:
译码格式指定:
0001为1个字节的二进制代码数据0002为2个字节的二进制代码数据,0004为4个字节的二进制代码数据。
译码信号地址:
给定一个存储代码数据的地址。
译码指定数:
给定要译码的8个连续数字的第一位。
译码结果输出:
给定一个输出译码结果的地址。
图3-75b中,加工程序执行M03、M04、M05、M06、M07、M08、M09、M10时,、、、、、、、分别为1。
〔3〕M代码代码辅助功能执行的代码指令信息〔F10〕转换成开关量控制,程序执行到M00时,为1;程序执行到M01时,为1;程序执行到M02时,R0,2为1;程序执行到M03时,为1;程序执行到M04时,为1;程序执行到M05时,为1;程序执行到M08时,为1;程序执行到M09时,为1。
为串行数字主轴正转控制信号,为串行数字主轴反转控制信号,为系统自动运行状态信号〔系统在状态〕,为系统复位信号。
当系统在自动运行时,程序执行到M03或M04主轴按给定的速度正转或反转,程序执行到M05或系统复位〔包括程序的M02、M30代码〕,主轴停止旋转。
在执行M05时,参加了系统分配结束信号,如果移动指令和M05在同一程序段中,保证执行完移动指令后执行M05指令,进给结束后主轴电动机才停止。
当程序执行到M08时,通过输出信号控制冷却泵电动机翻开机床冷却液,程序执行到M09时,关断机床冷却液,同理执行M09时也需要参加系统分配结束信号。
当程序执行到M02或M30时,系统外部复位信号为1,停止程序运行并返回到程序的开头。
当程序执行到M00或M01〔同时选择停输出信号为1〕,系统执行程序单段运行〔为1〕。
为主轴速度到达信号,为主轴速度为零的信号,为M代码完成信号,为T代码完成信号。
图3-76辅助功能M代码的代码控制时序
M代码控制时序如图3-77所示。
系统读到程序中的M代码指令时,就输出M代码指令的信息,FANUC-0i系统M代码信息输出地址为F10-F13〔4个字节二进制代码〕。
通过系统读M代码的延时时间TMF〔系统参效设定,标准设定时间为16ms后,系统输出M代码选通信号MF,FANUC-0i系统M代码选通信号为。
当系统代码选通信号〔MT〕后,执行代码信息译成某继电器为1〔开关信号〕,通过是否参加分配结束信号〔DEN〕实现移动指令和M


- 配套讲稿:
如PPT文件的首页显示word图标,表示该PPT已包含配套word讲稿。双击word图标可打开word文档。
- 特殊限制:
部分文档作品中含有的国旗、国徽等图片,仅作为作品整体效果示例展示,禁止商用。设计者仅对作品中独创性部分享有著作权。
- 关 键 词:
- 第3章 数控机床冷却控制系统装调 数控技术专业第3章 数控机床冷却控制系统装调 数控技术 专业 数控机床 冷却 控制系统
 冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
冰点文库所有资源均是用户自行上传分享,仅供网友学习交流,未经上传用户书面授权,请勿作他用。
 《财经法规》新大纲试题doc.docx
《财经法规》新大纲试题doc.docx
-
《古代汉语专题》练习题库参考答案.docx
-
《好玩的球》大班教案.docx
-
《道德宣传标语》.docx
-
《多媒体技术与应用》教学大纲完整版.docx
-
《红楼梦》名著导读.docx
-
《家政服务母婴生活护理服务质量规范》中华人民共和国国家标准之欧阳总创编.docx
-
《跨越百年的美丽》初中生读后感10篇.docx
-
《旅游学》课后习题答案.docx
-
《商务谈判第二版》章后习题答案.docx
-
《公共基础知识》考点巩固经济考点最新版46.docx
-
《好的故事》原文和教学设计.docx
-
《dsp原理及应用修订版》邹彦主编课后答案个人终极修订版.docx
-
《计算机图形学》答案第四章.docx
-
《《药品经营许可证》零售核准程序》.docx
-
#基于WEB的停车场管理系统设计和实现.docx
-
《包身工》知识讲解.docx
-
《匆匆》读书笔记15篇.docx
-
《歌剧魅影》的观后感范文600字.docx
-
《树》美术教案.docx
-
《微报告》.docx
-
《财经法规与会计职业道德》测试题及答案.docx
-
《古诗两首》教学设计之三《池上》《小儿垂钓》.docx
-
《快乐数学》大班教案.docx
-
《青蓝工程工作总结》.docx
-
《为了和平》第二集《殊死较量》观后感作文最新5篇.docx
-
《信息的传递》单元测试题一.docx
-
《用比例解决问题》教学设计.docx
-
《中国石拱桥》教学设计15篇.docx
-
4可行性分析与需求分析.docx
-
7系统集成技术要求.docx
-
12星座运势.docx
-
精品五年级语文上册全册生字表 识字表汇总附字帖练习部编版.docx
-
建筑工程预算计算规则计量与计价.docx
-
盘锦振兴生态园区物业方案.docx
-
考试大论坛公共基础知识笔记可打印.docx
-
皮带运输机PLC自动控制毕业设计论.docx
-
精选房屋建筑学认识实习报告.docx
-
平安建设调研报告.docx
-
江苏省泰兴市第一高级中学学年高二上学期限时训练一英语试题 Word版含答案doc.docx
-
渴望五年级作文10篇大全.docx
-
平面设计师应该知道的印刷流程.docx
-
精选教师工作计划汇总十篇.docx
-
姜夔庆宫春》.docx
-
普通高等学校招生全国统一考试辽宁卷 数学 供理科考生使用 及答案.docx
-
空间特征分析.docx
-
普通混凝土配合比设计最新规范.docx
-
七年级上数学计算题.docx
-
精选学年人教版七年级数学上册11正数和负数同步练部分含答案5份汇总.docx
-
企业危机公关的媒介沟通策略.docx
-
交通灯综合控制报告概要.docx
